产品展示

优质供应
详细内容

产品描述:
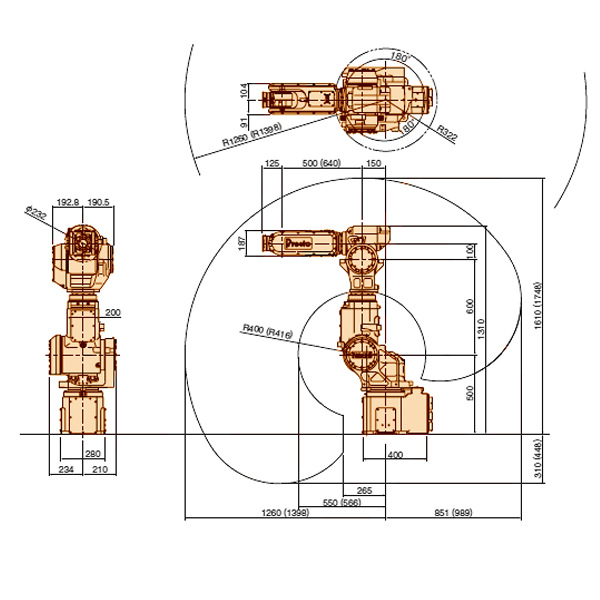
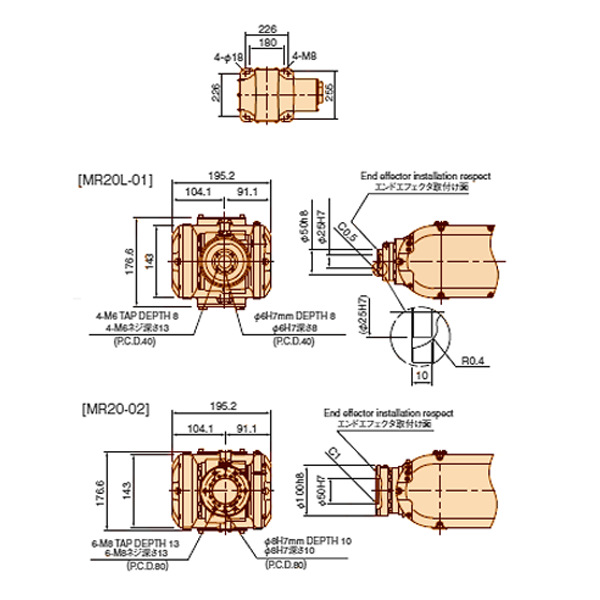
动作自如的7轴“腕”MR系列多用途机器人采用可进行更复杂动作的7轴结构,还可通过“绕后接近”方式灵活的应对以往的机器人难于使用的工序。紧凑式机器人手臂对节省设备空间做出极大的贡献。

产品特点:
采用可进行更加复杂动作的7轴结构: 在以往的6轴结构机器人无法实现应用机器人的狭小空间内以及存在障碍物的地方,也能够运用自如,小巧紧凑的机身与强有力的手臂: 可实现节省空间的布局设置。小巧紧凑的机身,充分的搬运能力,可搬运重量20Kg,为30Kg(不限定工作范围),适用的控制装置: FD11

产品参数:
| 型号 | MR20 | MR20L | MR35 | MR50 | |||
| 结构 | 关节型 | ||||||
| 自由度 | 7 | ||||||
| 驱动方式 | AC伺服方式 | ||||||
| * | 臂 | J1 | 旋回1 | ±180° | ±165° | ||
| J2 | 前后 | -95°~ +41° | |||||
| J7 | 旋回2 | ±180° | ±190° | ||||
| J3 | 上下 | -166°~ +135° | -146°~ +140° | ||||
| 手腕 | J4 | 回转2 | ±180° | ±360° | |||
| J5 | 弯曲 | ±135° | ±139° | ±125° | ±125° | ||
| J6 | 回转1 | ±360° | ±450° | ||||
| * 大 速 度 | 臂 | J1 | 旋回1 | 170°/s | 170°/s | 180°/s | 175°/s |
| J2 | 前后 | 170°/s | 170°/s | 175°/s | 2.44rad/s | ||
| J7 | 旋回2 | 170°/s | 130°/s | ||||
| J3 | 上下 | 170°/s | 170°/s | 180°/s | 165°/s | ||
| 手腕 | J4 | 回转2 | 250°/s | 360°/s | 305°/s | 255°/s | |
| J5 | 弯曲 | 250°/s | 360°/s | 305°/s | 255°/s | ||
| J6 | 回转1 | 300°/s | 600°/s | 420°/s | 370°/s | ||
| 可搬重量 | 手腕部 | 20(30kg)kg | 20kg | 35kg | 50kg | ||
| 第1手臂部负荷 | - | 15kg | |||||
| J3上部 | - | ||||||
| 手腕扭矩 | J4 | 回转2 | 80.8N??m | 49N??m | 160N??m | 210N??m | |
| J5 | 弯曲 | 80.8N??m | 49N??m | 160N??m | 210N??m | ||
| J6 | 回转1 | 44.1N??m | 23.5N??m | 90N??m | 130N??m | ||
| 手腕惯性力矩*2 | J4 | 回转2 | 6.0kg??m2 | 1.6kg??m2 | 16kg??m2 | 30N??m | |
| J5 | 弯曲 | 6.0kg??m2 | 1.6kg??m2 | 16kg??m2 | 30N??m | ||
| J6 | 回转1 | 2.3kg??m2 | 0.8kg??m2 | 5kg??m2 | 12kg??m2 | ||
| 工作半径 | 1260mm | 1398mm | 2050mm | 2050mm | |||
| 位置重复精度 | ±0.06mm | ±0.07mm | |||||
| 使用空气压力 | 0.49MPa (5.0kgf/cm2)以下 | ||||||
| 周围温度 | 0~45°C | ||||||
| 设置条件 | 地面安装,悬吊安装 | ||||||
| 耐环境性*3 | 等同于IP65(防尘防水) | ||||||
| 主机重量 | 230kg | 745kg | |||||