产品展示

优质供应
详细内容

产品描述:
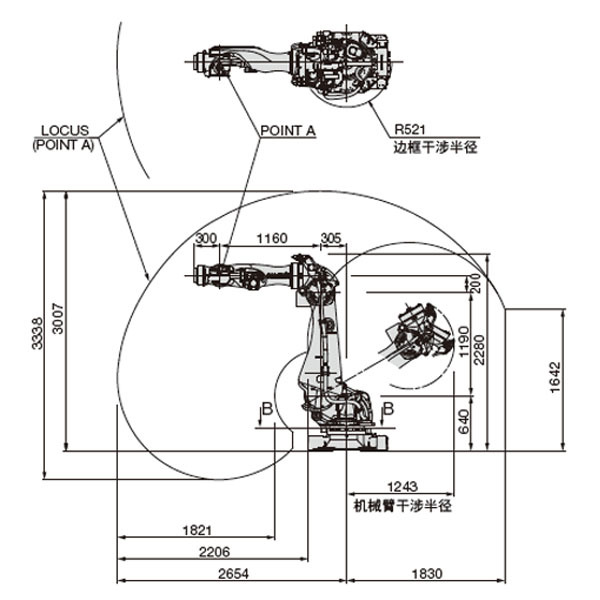
超高速点焊机器人的*终版通过追求加速性和减震性,推进轻型化、高刚性和高速控制等三个因素,实现节拍缩短30%,生产性得到飞跃性的提高。紧凑式机身可实现更高密度的设置,进而减轻了定期检查或零件更换等作业的负担,还提高了维护性。

产品特点:
提高舾装电缆,软管的可靠性:使电缆活动稳定,避免与周边装置的干扰伤害,从而提高可靠性,缩短启动时间:电缆与周边装置没有干扰,大幅缩短确认作业程序的时间,扩大手腕动作范围: 与传统A-Trac相比,J5动作范围扩大到±10°,J6动作范围扩大到±5°(210kg可搬运级别),直线动作量提升20%,提高连接性: 与传统A-Trac相比,手腕干扰范围减少27%,可靠近狭小场所,高速性:中空机械臂可进行与SRA相同的高速动作

产品参数:
| 机器人类型 | SRA210V | SRA210T-01A | |||
| 结构 | 关节型 | ||||
| 关节数 | 6 | ||||
| 驱动方式 | AC伺服方式 | ||||
| * | 臂 | J1 | 旋回1 | ±165° | ±180° |
| J2 | 前后 | +60°~-80° | +120°~-65° | ||
| J7 | 旋回2 | —
| —
| ||
| J3 | 上下 | +150°~-146.5° | +210°~-106° | ||
| 手 | J4 | 回转2 | ±360° |
±360(±210°) | |
| J5 | 弯曲 | ±130° | ±130(±120°) | ||
| J6 | 回转1 | ±360° | ±360(±205°) | ||
| * | 臂 | J1 | 旋回1 | 115°/s | 100°/s |
| J2 | 前后 | 105°/s | 90°/s | ||
| J7 | 旋回2 | —
| —
| ||
| J3 | 上下 | 113°/s | 100°/s | ||
| 手 | J4 | 回转2 | 140°/s | 140°/s | |
| J5 | 弯曲 | 133°/s | 133°/s | ||
| J6 | 回转1 | 200°/s | 200°/s | ||
| 可搬质量 | 手腕部 | 210kg | 210kg | ||
| 手臂上※1 | 45kg ( 90kg) | ||||
| 容许静负 荷扭矩 | J4 | 回转2 | 1,337N??m | ||
| J5 | 弯曲 | 1,337N??m | |||
| J6 | 回转1 | 720N??m | |||
| 容许惯 性力矩※2 | J4 | 回转2 | 141.1kg??m2 | ||
| J5 | 弯曲 | 141.1kg??m2 | |||
| J6 | 回转1 | 79.0kg??m2 | |||
| 位置反复精度※3 | ±0.15mm | ||||
| 周围温度 | 0~45°C | ||||
| 设置条件 | 架上安装 | 悬吊安装 | |||
| 本体质量 | 990kg | 1250kg | |||