



≤ķ∆∑’Ļ ĺ
◊®“Ķő¨–řőų√Ň◊”6FC5356-0BB11-0AE0
Ķ„Ľųīő ż£ļ4∑Ę≤ľ Īľš£ļ2017/6/16 15:20:19

łŁ–¬»’∆ŕ£ļ2017/10/23 17:56:44
ňý ‘ŕ Ķō£ļ÷–Ļķīů¬Ĺ
≤ķ∆∑–ÕļŇ£ļ
∆∑Ň∆√Ż≥∆£ļőų√Ň◊”
”Ň÷ Ļ©”¶
ŌÍŌłńŕ»›
1 °£∆ŃńĽĪ®ĺĮŐŠ ĺnc\plcőīѨŔ£¨£®ncuļÕpcu∂ľ”–ő Ő‚£©°£ 3.ňÕĶÁň≤ľšňý”–Ķ∆∂ľŃŃ£¨Ķę « ż¬ŽĻ‹őřŌ‘ ĺ£¨»Ľļůňý”–Ķ∆ň≤ľšĪšįĶ£¨pokĶ∆Ō®√ū£¨ ż¬ŽĻ‹≤ĽŃŃ
6fc5357-0bb13-0aa0ő¨–řőų√Ň◊”ncuő¨–řĻ ’Ō£ļ
őų√Ň◊”NCU√Ľ”–Ō‘ ĺ
1.őų√Ň◊”840d żŅōŌĶÕ≥őų√Ň◊”ncuŅ™≤ĽŃňĽķ£¨Ņ™Ľķncu≤Ľń‹∆Ű∂Į°£
2.6fc5357-0bb13-0aa0ő¨–řőų√Ň◊”840d żŅōŌĶÕ≥Ķńncuļ–7∂ő ż¬ŽĻ‹√Ľ”–Ō‘ ĺ£¨∆ŃńĽĪ®ĺĮŐŠ ĺnc\plcőīѨŔ£¨£®ncuļÕpcu∂ľ”–ő Ő‚£©°£
| …Ōļ£» ≤ ◊‘∂ĮĽĮŅ∆ľľ”–ŌřĻęňĺ Ń™ŌĶ»ň£ļĶň Ĺ‹ £®Ōķ ŘĻ§≥Ő ¶£© |
| ÷ Ľķ£ļ18321021125 |
| …ŐőŮQQ£ļ3199208773 |
| ĶÁĽį£®TEL£©:021-67353305 |
| īę’ś£®FAX£©:021-33697655 |
| 24–° ĪŌķ Řľľ ű∑ĢőŮ»»ŌŖ£ļ17316599215 |
| őĘ–ŇļŇ:17316599215 Ķō÷∑£ļ…Ōļ£ –Ĺū…Ĺ«Ý∑„„Ģ’Ú–¬„Ģ¬∑59ļŇ |
3°ĘňŇ∑Ģ«ż∂ĮĶ•‘™£®«ż∂ĮįŚ£©£ļ6SN,6FC,6SL»ęŌĶŃ––ÕļŇ°£
4°ĘňŇ∑Ģ«ż∂Į∆ų£ļňŇ∑Ģ«ż∂Į∆ų6SN1123»ęŌĶŃ––ÕļŇ£®10KW°ę120KW£©°£
5°ĘňŇ∑ĢĶÁĽķ£ļ1PHŌĶŃ–°Ę 1FTŌĶŃ–°Ę1FKŌĶŃ–£®÷Š≥–SKF°Ę»∆◊ť°Ę∑®ņľ°Ę∂ňł«°ĘĪŗ¬Ž∆ų°ĘĪß’ĘĶ»Ļ ’ŌĺýŅ…ő¨–ř£©£¨ő“Ļęňĺő¨–řňŇ∑ĢĶÁĽķľ” ľĪ»żłŲĻ§◊ų»’ľīŅ…–řłī£¨»∆◊ťĹĢ∆Šľįļśł…–Ť“™ŃĹŐž£¨«Š÷ōłļ‘ō≤‚ ‘–Ť“ĽŐž°£
6°Ę ÷≥÷Ņō÷∆Ķ•‘™£® ÷¬÷£©£ļ6FX2007»ęŌĶŃ––ÕļŇ°££®–ťŌ‘°Ęőř÷ī––∑ī”¶°Ę‘™Ķ„≥Ķ°ĘőřŌ‘ ĺ°ĘĶÁ‘īľ”≤Ľ…Ō°ĘÕ®–ŇĻ ’ŌĶ»£©
7°ĘņŌŌĶÕ≥÷ų÷ŠňŇ∑Ģ«ż∂Į£ļ6SC660ŌĶŃ–°Ę6SC650ŌĶŃ–°Ę6SC620ŌĶŃ–°Ę6SC610ŌĶŃ–°Ę6SC6110ŌĶŃ–°Ę6SC6111ŌĶŃ–°Ę6SC6112ŌĶŃ–°Ę 6SC6100ŌĶŃ–°Ę6SCY120ŌĶŃ–°Ę6SC6130ŌĶŃ–°Ę6SC6140ŌĶŃ–°Ę6SC6170Ķ»»ęŌĶŃ––ÕļŇĺýŅ…ő¨–ř≤‚ ‘°£6SN1118-0AA11-0AA1 REG-VSAAN KO1A 6SN1118-0AA11-0AA1 VERS:B
6SN1118-0AD11-0AA1 CONT-VSAAN ST1A 6SN1118-0AD11-0AA1
6SN1118-0AE11-0AA1 CONT-VSAAN ST2A 6SN1118-0AE11-0AA1
6SN1118-0BJ11-0AA0 CONT-VSAAN RE1A 6SN1118-0BJ11-0AA0
6SN1118-0BK11-0AA0 CONT-VSAAN RE2A 6SN1118-0BK11-0AA0
6SN1118-0DA11-0AA0 CON.DIG.VSA 1A 6SN1118-0DA11-0AA0 K.DIRM
6SN1118-0DA12-0AA0 CON.DIG.VSA 1A 6SN1118-0DA12-0AA0 DIRM.S
6SN1118-0DA13-0AA0
∑Ę CON.DIG.VSA-1A 6SN1118-0DA13-0AA0 DIR.ME
6SN1118-0DB11-0AA0 CON.DIG.VSA-2A 6SN1118-0DB11-0AA0 K.DIRM
6SN1118-0DB12-0AA0 CON.DIG.VSA-2A 6SN1118-0DB12-0AA0 DIR.ME
6SN1118-0DB13-0AA0 CON.DIG.VSA-2A 6SN1118-0DB13-0AA0 DIR.ME
6SN1118-0DG21-0AA1 CONT-D PF1A KDM 6SN1118-0DG21-0AA1
6SN1118-0DG22-0AA1 CONT-D PF1A 1DMI6SN1118-0DG22-0AA1
6SN1118-0DG23-0AA1 CONT-D PF1A 1DMU6SN1118-0DG23-0AA1
6SN1118-0DH21-0AA1 CONT-D PF2A KDM 6SN1118-0DH21-0AA1
6SN1118-0DH22-0AA1 CONT-D PF2A 2DMI6SN1118-0DH22-0AA1
6SN1118-0DH23-0AA1 CONT-D PF2A 2DMU6SN1118-0DH23-0AA1
6SN1118-0DJ21-0AA0 CONT DP2-1A KDMOBS 6SN1118-0DJ21-0AA0
6SN1118-0DJ21-0AA1 CONT D P2 1A KDM 6SN1118-0DJ21-0AA1
6SN1118-0DJ21-0AA2 REGR D P2 1A KDM 6SN1118-0DJ21-0AA2
6SN1118-0DJ23-0AA0 CONT DP2-1A DMUOBS 6SN1118-0DJ23-0AA0
6SN1118-0DJ23-0AA1 CONT D P2 1A DMU 6SN1118-0DJ23-0AA1
6SN1118-0DJ23-0AA2 REGR D P2 1A DMU 6SN1118-0DJ23-0AA2
6SN1118-0DK21-0AA0 CONT DP2-2A KDMOBS 6SN1118-0DK21-0AA0
6SN1118-0DK21-0AA1 CONT D P2 2A KDM 6SN1118-0DK21-0AA1
6SN1118-0DK21-0AA2 REGR D P2 2A KDM 6SN1118-0DK21-0AA2
6SN1118-0DK23-0AA0 CONDP2-2A DMUOBS 6SN1118-0DK23-0AA0
6SN1118-0DK23-0AA1 CONT D P2 2A DMU 6SN1118-0DK23-0AA1
6SN1118-0DK23-0AA2 REGR D P2 2A DMU 6SN1118-0DK23-0AA2
6SN1118-0DM11-0AA1 CONT -D ST2A KDM 6SN1118-0DM11-0AA1
6SN1118-0DM13-0AA1 CONT -D ST2A 2DMU6SN1118-0DM13-0AA1
6SN1118-0DM21-0AA0 CONT D ST2-2A KDM6SN1118-0DM21-0AA0
6SN1118-0DM23-0AA0 CONT DST2-2A 2DMU6SN1118-0DM23-0AA0
6SN1118-0DM31-0AA0 CONT D ST3-2A KDM 6SN1118-0DM31-0AA0
6SN1118-0DM31-0AA1 CONT D S3 2A KDM 6SN1118-0DM31-0AA1
6SN1118-0DM31-0AA2 REGR D S3 2A KDM 6SN1118-0DM31-0AA2
6SN1118-0DM33-0AA0 CONT D ST3-2A DMU 6SN1118-0DM33-0AA0
6SN1118-0DM33-0AA1 CONT D S3 2A DMU 6SN1118-0DM33-0AA1
6SN1118-0DM33-0AA2 REGR D S3 2A DMU 6SN1118-0DM33-0AA2
6SN1118-0NH00-0AA2 CONT -U.2A.OPT-N 6SN1118-0NH00-0AA2
6SN1118-0NH00-0BA2 CONT -U.2A.OPT-N 6SN1118-0NH00-0BA2
6SN1118-0NH01-0AA0 CONT -U.2A.OPT-N 6SN1118-0NH01-0AA0 611U
6SN1118-0NH01-0AA1 REGR U2A OPT-N 6SN1118-0NH01-0AA1
6SN1118-0NH10-0AA0 SIMODRIVE 611 UNIVERSAL E
6SN1118-0NH10-0AA2 CON-U_E 2AXES 6SN1118-0NH10-0AA2 VERS:A
6SN1118-0NH11-0AA0 CONT -U_E 2AXES 6SN1118-0NH11-0AA0
6SN1118-0NH11-0AA1 REGR U_E 2ACHS 6SN1118-0NH11-0AA1
6SN1118-0NJ00-0AA0 SIMODRIVE 611 UNIVERSAL
6SN1118-0NJ00-0AA1 REG-U.1A.RES-N 6SN1118-0NJ00-0AA1
6SN1118-0NJ00-0AA2 CONT -U.1A.RES-N 6SN1118-0NJ00-0AA2
6SN1118-0NJ01-0AA0 CONT -U.1A.RES-N 6SN1118-0NJ01-0AA0
6SN1118-0NJ01-0AA1 CONT U 1A RES-N 6SN1118-0NJ01-0AA1
6SN1118-0NK00-0AA0 CONT -U.2A.RES-N 6SN1118-0NK00-0AA0
6SN1118-0NK00-0AA1 CONT -U.2A.RES-N 6SN1118-0NK00-0AA1
6SN1118-0NK00-0AA2 CON-U.2A.RES-N 6SN1118-0NK00-0AA2 VERS:A
őų√Ň◊”īķņŪ…Ő-…Ōļ£őųĽ £¨Ņ‚īśīůŃŅőų√Ň◊”PLC£¨≤ķ∆∑÷÷ņŗ°Ę–ÕļŇ∆Ž»ę£¨ļ≠ł«Ńňőų√Ň◊”200ŌĶŃ–PLC°Ęőų√Ň◊”300ŌĶŃ–PLCľį∆šEM221ń£Ņť°ĘEM222ń£Ņť°ĘEM223ń£Ņť°ĘEM231ń£Ņť°ĘEM232ń£Ņť°ĘEM235ń£Ņť°ĘPPIĶÁņ¬°ĘMPIĶÁņ¬°Ę5611Ņ®°ĘSM321°ĘSM322°ĘSM323°ĘSM331°ĘEM332ń£ŅťĶ»£¨S7-200ŌĶŃ–÷ųĽķįŁņ®CPU224CN°ĘCPU226CN°ĘCPU224XP£¨S7-300ŌĶŃ–÷ųĽķįŁņ®CPU312°ĘCPU313°ĘCPU314°ĘCPU315-2DPĶ»£¨ľŘłŮĶÕ£¨ĹĽĽűňŔ∂»Ņž°£
≥–ŇĶ“Ľ£ļ1°ĘĺÝ∂‘Ī£÷§»ę–¬‘≠◊įĹÝŅŕ
≥–ŇĶ∂Ģ£ļ2°ĘĺÝ∂‘Ī£÷§į≤»ę◊ľ Ī∑ĘĽű
≥–ŇĶ»ż£ļ3°ĘĺÝ∂‘Ī£÷§ Řļů∑ĢőŮ÷ ŃŅ
Ńų≥Ő“Ľ£ļ1°ĘŅÕĽß»∑»Ōňý–Ť≤…Ļļ≤ķ∆∑–ÕļŇ
Ńų≥Ő∂Ģ£ļ2°Ęő“∑ĹĽŠłýĺ›—ĮľŘĶ•–ÕļŇ≤ť—ĮľŘłŮ“‘ľįĹĽĽű∆ŕ£¨ń‚“Ľ∑›ŌÍŌł’żĻśĪ®ľŘĶ•
Ńų≥Ő»ż£ļ3£¨ŅÕĽß ’ĶĹĪ®ľŘĶ•≤Ę»∑»Ō–ÕļŇőřőůļů∂©Ļļ≤ķ∆∑
Ńų≥Őňń£ļ4°ĘĪ®ľŘĶ•łļ‘ū»ňłýĺ›ŅÕĽßŐŠĻ©–ÕļŇ“‘ľį żŃŅń‚∑›Ōķ ŘļŌÕ¨
Ńų≥ŐőŚ£ļ5°ĘŅÕĽß ’ĶĹļŌÕ¨≤ť‘ńÕ¨“‚ļůł«’¬Ľōīę≤Ęįī’’ļŌÕ¨Ōķ Ř∂ÓĽ„ŅÓĶĹĻęňĺŅ™Ľß––
Ńų≥ŐŃý£ļ6°Ęő“Ļęňĺ≤∆őŮ≤ťĶĹŅÓļů£¨“ĶőŮ‘Īį≤ŇŇ∑ĘĽű≤ĘÕ®÷™ŅÕĽßłķ◊Ŕ‘ňĶ•
MCňŇ∑ĢŅō÷∆∆ųľÚ√ųĶų ‘
1 ŌĶÕ≥łŇ Ų
MASTERDIVE ľ“◊ŚĶń6SE70ŌĶŃ–Īš∆Ķ∆ųįŁļ¨VCļÕ MCŃĹ÷÷Īš∆Ķ∆ų°£
MC ◊®√Ň”¶”√”ŕ‘ň∂ĮŅō÷∆ŌĶÕ≥£¨Ļ„∑ļ”¶”√”ŕĺęľ”Ļ§––“Ķ£ļ≥Ķī≤£¨”°ňĘ£¨∑ń÷Į£¨Ľķ–Ķľ”Ļ§Ķ»°£
Ļ”√MCŅō÷∆∆ųŅ… ĶŌ÷»ÁŌ¬Ļ¶ń‹£ļ
•® ňŔ∂»Ņō÷∆
•® őĽ÷√Ņō÷∆
•® ◊į÷√÷ģľšĶńĹ«Õ¨≤ĹŅō÷∆
MC÷–įŁļ¨ń£ŅťĽĮĶń»ŪľĢ…Ťľ∆£ļ
•® «ŅīůĶń◊‘”…Ļ¶ń‹Ņť£®įŁļ¨ĽýĪĺ∂®őĽĻ¶ń‹£©
•® Ļ§“’»ŪľĢįŁF01
MCŌĶÕ≥ĶńĻ¶¬ ≤Ņ∑÷”ŽVCĶńĻ¶¬ ≤Ņ∑÷ŌŗÕ¨£¨įī’’≤ĽÕ¨◊į÷√ĹŠĻĻŅ…Ľģ∑÷ő™£®ľŻÕľ1£©£ļ

Õľ1
∆š÷–‘Ų«Ņ ťĪĺ–Õ◊į÷√£¨Ņō÷∆įŚ”ŽĻ¶¬ ‘™ľĢő™“ĽŐŚ£¨“‘Ķ√ĶĹłŁľ”ĹŰī’ĶńĹŠĻĻ£¨∂Ý ťĪĺ–Õ◊į÷√ļÕ◊įĽķ◊įĻŮ–Õ◊į÷√‘Ú”Ķ”–∂ņŃĘĶńĶÁ◊”Ōš£¨Ņō÷∆įŚŅ…“‘≤Śįő£¨∑ĹĪ„łŁĽĽ°£łŁĽĽ ťĪĺ–ÕĽÚ◊įĽķ◊įĻŮ–Õ◊į÷√ĶńŅō÷∆įŚļů£¨≤Ŕ◊ų»ÁŌ¬£ļ

Õľ2
2 Īŗ¬Ž∆ųĶń Ļ”√
MC“™ ĶŌ÷∂®őĽŅō÷∆£¨–Ť“™ Ļ”√Īŗ¬Ž∆ų◊ųő™ňŔ∂»ļÕőĽ÷√Ķń∑īņ°–ŇļŇ°£
Īŗ¬Ž∆ų‘ŕį≤◊į Ļ”√…Ō∑÷ő™ĶÁĽķĪŗ¬Ž∆ų£¨Õ‚≤ŅĪŗ¬Ž∆ų°£∂Ģ’ŖŅ…“‘Õ¨ Ī Ļ”√£¨“≤Ņ…“‘Ķ•∂ņ Ļ”√°£
ĶÁĽķĪŗ¬Ž∆ų£¨į≤◊į‘ŕĶÁĽķ÷Š…Ō£¨Ņ…“‘≤‚ŃŅĶÁĽķĶń◊™ňŔ“‘ľįĶÁĽķĶńőĽ÷√£¨Õ¨ ĪŅ…“‘Õ®ĻżĽķ–Ķ…ŤĪłĶńĪšĪ»ĻōŌĶ£¨∑ī”≥≥ŲĽķ–Ķ…ŤĪłĶńőĽ÷√°£
Õ‚≤ŅĪŗ¬Ž∆ų£¨į≤◊į‘ŕĽķ–Ķ…ŤĪł…Ō£¨”√”ŕľž≤‚…ŤĪłĶńőĽ÷√£¨Ņ…“‘łŁ◊ľ»∑Ķō∑ī”≥*÷’Ľķ–Ķ…ŤĪłĶńőĽ÷√°£
ĶÁĽķĪŗ¬Ž∆ų–Ť“™ĹęĪŗ¬Ž∆ųįŚ◊į‘ŕC≤Ř°£
Ņ…“‘ Ļ”√ĶńĪŗ¬Ž∆ųņŗ–Õ£¨“‘ľįĪŗ¬Ž∆ųĹ”Ņŕń£įŚ»ÁÕľ3ňý ĺ
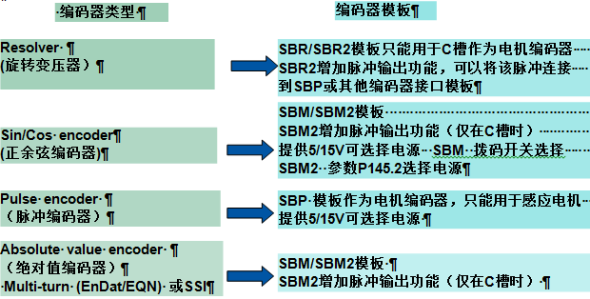
Õľ3
3 ĶÁĽķņŗ–Õ
MCŅō÷∆∆ųŅ…“‘«ż∂ĮÕ¨≤ĹĶÁĽķ£¨“ž≤ĹĶÁĽķ, ņŗ–ÕÕ®ĻżP095ĹÝ––—°‘Ů°££®Õľ4£©

Õľ4
◊Ę“‚£ļ
‘ŕ Ļ”√”ņīŇÕ¨≤ĹĶÁĽķ Ī£¨–Ť“™◊Ę“‚◊™◊”Ń„Ķ„Ķńő Ő‚°£
őų√Ň◊”ĪÍ◊ľÕ¨≤ĹňŇ∑ĢĶÁĽķ‘ŕ≥Ų≥ß Ī£¨“—ĺ≠Ī£÷§Īŗ¬Ž∆ųĶńŃ„Ķ„”Ž◊™◊”Ń„Ķ„∂‘”¶£¨īň Ī–Ť“™Ī£÷§∂ĮѶĶÁņ¬ĶńŌŗ–ÚU,V,W”ŽĪš∆Ķ∆ųĶń š≥ŲŌŗ–ÚŌŗÕ¨°£
∂‘”ŕ√Ľ”–»∑∂®◊™◊”ľęőĽ÷√ĶńÕ¨≤ĹĶÁĽķ£¨ĽÚ’Ŗ”√Ľß◊‘ľļłŁĽĽŃňĪŗ¬Ž∆ų£¨–Ť“™ĹÝ––◊™◊”Ń„Ķ„Ķń–£’ż£¨∑Ů‘ÚĽŠĶľ÷¬ĶÁĽķ ßŅō°£
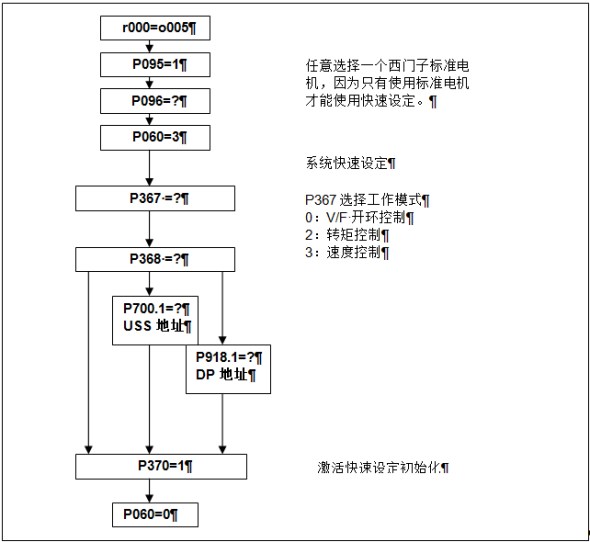
4 ŌĶÕ≥…Ť∂®
4.1 Ľ÷łīĻ§≥ß…Ť∂®
īő Ļ”√MCŅō÷∆∆ų£¨ ◊––≤ő żĶńĻ§≥ßłīőĽ£¨Ī£÷§≤ő żĽ÷łīĶĹĻ§≥ß…Ť∂®÷Ķ°£
Õľ5
4.2 Ļ”√őų√Ň◊”ĪÍ◊ľĶÁĽķ ĪĶńŌĶÕ≥≤ő ż…Ť∂®

Õľ6
4.3 Ķ໿∑ĹĶÁĽķ…Ť∂®
ĶĪ Ļ”√Ķ໿∑ĹĶÁĽķ Ī£¨»ÁĻŻ”√ĽßŌŽ“™ Ļ”√ĪÍ◊ľĶńŅō÷∆∑Ĺįł‘Ú–Ť“™ ◊––Ō¬Ń–≤Ŕ◊ų°£
Õľ7

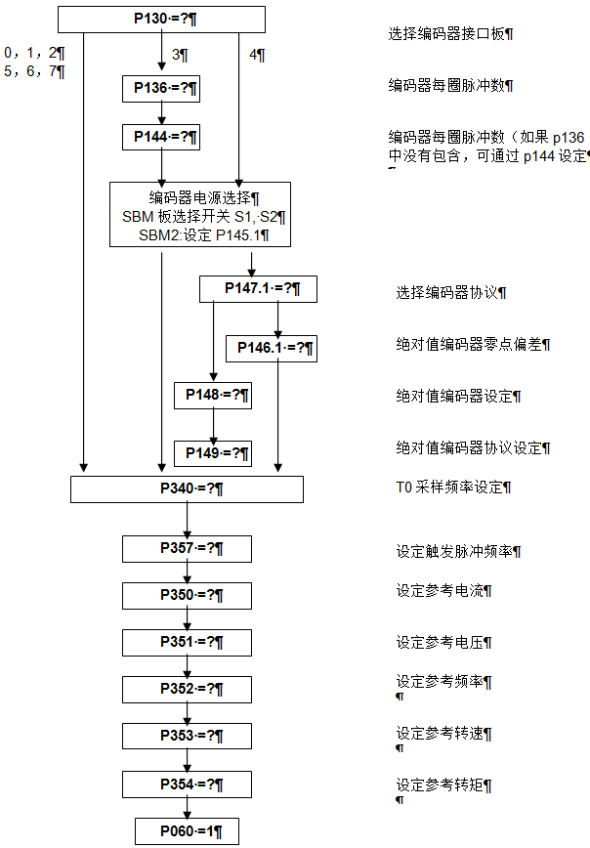
Õľ8
”…”ŕĶ໿∑ĹĶÁĽķÕ®≥£≤ĽŐŠĻ©ĶÁĽķĶń◊ŤŅĻĶ»≤ő ż£¨ňý“‘–Ť“™ĹÝ––”ŇĽĮņī—į’“’‚–©ĶÁĽķĶń≤ő ż£ļ

Õľ9
5 ŌĶÕ≥ĪÍ◊ľŇš÷√£®p368£©
p368=1 ∂ň◊”Ņō÷∆
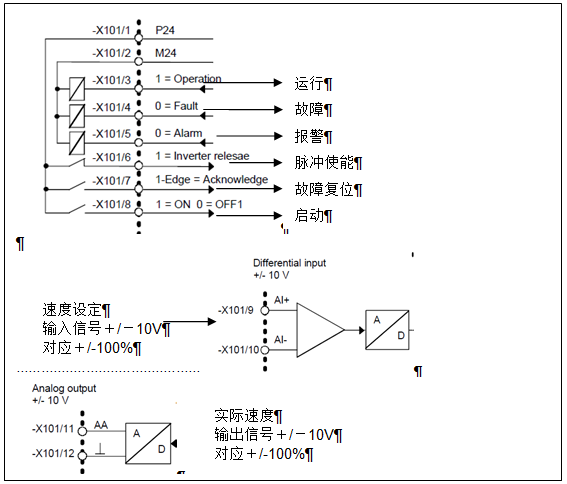
Õľ10
p368=2∂ň◊”ļÕĻŐ∂®∆Ķ¬ …Ť∂®Ņō÷∆
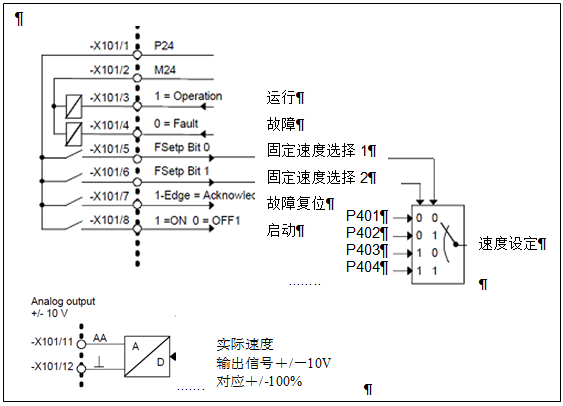
Õľ11
p368=3∂ň◊”ļÕĶÁ∂ĮĶÁőĽľ∆…Ť∂®Ņō÷∆

Õľ12
p368=0 PMU√śįŚŅō÷∆£®ĹŲ∂‘”ŕ ťĪĺ–ÕļÕ◊įĽķ◊įĻŮ–Õ◊į÷√£©

Õľ13
p368=4 USSÕ®—∂Ņō÷∆

Õľ14
p368=6 PROFIBUS DP Õ®—∂Ņō÷∆

‘ŕĪ£÷§ňŔ∂»ń£ Ĺń‹’ż≥£Ļ§◊ųļů£¨»ÁĻŻ–Ť“™ Ļ”√MCŌĶÕ≥Ķń∂®őĽĻ¶ń‹£¨‘Ú–Ť“™ ÷∂Įľ§ĽÓőĽ÷√Ņō÷∆∆ų°£
…Ť∂®P210=1ľīŅ…°£Õ®≥£≤…”√Ķń∂®őĽ∑Ĺ Ĺ”–»ÁŌ¬»ż÷÷£ļ
1.® ÷ĪĹ”őĽ÷√Ņō÷∆
‘ŕł√∑Ĺ ĹŌ¬£¨Õ®Ļż≤ő żP209…Ť∂®ńŅĪÍőĽ÷√£¨‘ŕ∆Ű∂Į√ŁŃÓļů£¨ĶÁĽķ÷ĪĹ”‘ň––ĶĹńŅĪÍőĽ÷√£¨ł√ń£ ĹĪ»ĹŌľÚĶ•£¨Ķę «»›“◊≤ķ…ķ≥ŚĽų£¨“Úīň‘ŕ…Ť∂®ńŅĪÍőĽ÷√Ķń ĪļÚ£¨ĺ°ŃŅĹę…Ť∂®őĽ÷√ĺ≠Ļż–Ī∆¬∑Ę…ķ∆ųĶń∑Ĺ Ĺ◊ųő™łÝ∂®£¨“‘Ī‹√‚őĽ÷√…Ť∂®ĶńĹ◊‘ĺ°£
2. ®ĽýĪĺ∂®őĽĻ¶ń‹
‘ŕMCĶń◊‘”…Ļ¶ń‹Ņť÷–£¨◊®√ŇŅ™∑ĘŃňĽýĪĺ∂®őĽĻ¶ń‹£¨Ņ…“‘ ĶŌ÷“Ľ–©ľÚĶ•Ķń∂®őĽ≤Ŕ◊ų£¨ń‹ĻĽ¬ķ◊„ĺÝīů≤Ņ∑÷Ķń∂®őĽŅō÷∆°£ŌÍŌł≤Ŕ◊ųľį√Ť ŲľŻĽýĪĺ∂®őĽĻ¶ń‹ľÚĶ•Ķų ‘ ÷≤Š°£
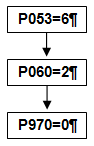
3.® F01Ļ§“’»ŪľĢ
‘ŕMC÷–Õ¨ ĪľĮ≥…ŃňłŁľ”»ę√śĶń∂®őĽŅō÷∆Ļ§“’įŁ£¨Ņ…“‘¬ķ◊„∂ŗ÷÷łī‘”Ķń∂®őĽŅō÷∆“™«ů£¨Ķę «“™ Ļ”√ł√»ŪľĢįŁ£¨–Ť“™Ļļ¬Ú ŕ»®¬Ž£¨ņīľ§ĽÓł√Ļ§“’įŁ°£Ļō”ŕF01Ļ§“’»ŪľĢĶń Ļ”√£¨«Ž≤őŅľF01ľÚĶ•Ķų ‘ ÷≤Š°£
ňś◊ŇŌ÷īķĻ§“Ķ∂‘ĺę√‹ĽĮ°ĘłŖňŔĽĮ°ĘłŖ–‘ń‹Ķń“™«ůĶń≤Ľ∂Ō∑Ę’Ļ£¨īęÕ≥ĶńŅō÷∆∆ų‘ŕłŖ“™«ůĶń≥°ļŌ“—ĺ≠≤Ľń‹ĻĽ §»ő£¨‘ŕļ‹∂ŗ“™«ůłŖ Ķ Ī–‘£¨łŖ–߬ Ķń≥°ļŌ£¨ĺÕĪō–Ž“™”√◊®√ŇĶń ż◊÷–ŇļŇī¶ņŪ∆ų(DSP)ņīīķŐśīęÕ≥ĶńŅō÷∆∆ųĶń≤Ņ∑÷Ļ¶ń‹°£ŐōĪū «‘ŕŅō÷∆ň„∑®łī‘”ĽÚ∂‘ň„∑®ĹÝ––łńĹݔҼĮĶń ĪļÚ£¨DSP∂ņŐōĶńŅžňŔľ∆ň„Ķńń‹Ń¶ĺÕ√ųŌ‘ĶńŐŚŌ÷≥Ųņī°£
ŃŪÕ‚£¨ňś◊ŇľĮ≥…ĶÁ¬∑÷∆‘žľľ űĶńĹÝ≤ĹļÕĶÁѶĶÁ◊”ľľ űĶń∑Ę’Ļ£¨ĹĽŃųňŇ∑Ģ“≤Ķ√ĶĹŃň≥§◊„Ķń∑Ę’Ļ°£ľĮ»żŌŗńśĪš∆ųļÕĪ£Ľ§ĶÁ¬∑°ĘłŰņŽĶÁ¬∑°Ęń‹ļń÷∆∂ĮĶÁ¬∑Ķ»Ļ¶ń‹ő™“ĽŐŚĶń÷«ń‹Ļ¶¬ ń£Ņť°ĘĶńĶÁѶĶÁ◊”∆ųľĢĶń≥ŲŌ÷°Ę ĻĹĽŃųňŇ∑ĢŅō÷∆łŁ∑ĹĪ„°ĘĻ¶ļńłŁĶÕ°ĘŅ™Ļō ĪľšłŁ∂Ő°ĘĪš∆Ķ∑∂őßłŁŅŪ°Ę–‘ń‹łŁ”Ň‘Ĺ°£’‚–©∂ľ ĻĹĽŃųňŇ∑ĢŌŗ∂‘÷ĪŃųňŇ∑ĢŐŚŌ÷≥ŲŃň√ųŌ‘Ķń”Ň‘Ĺ–‘°£
1 ŌĶÕ≥łŇ Ų
ĹĽŃųňŇ∑Ģ ż◊÷ĽĮŌĶÕ≥Ķń”≤ľĢ”…DSP◊ųő™–ŇļŇī¶ņŪ∆ų£¨”√–ż◊™Īŗ¬Ž∆ųļÕĶÁŃųīęł–∆ųŐŠĻ©∑īņ°–ŇļŇ£¨÷«ń‹Ļ¶¬ ń£ŅťIPM◊ųő™ńśĪš∆ų£¨ĺ≠īęł–∆ų≥ŲņīĶń–ŇļŇĺ≠Ļż¬ň≤®’Ż–őĶ»ī¶ņŪļů∑īņ°łÝDSPĹÝ––‘ňň„£¨DSPĺ≠Ļż∂‘≤őŅľ–ŇļŇļÕ∑īņ°–ŇļŇĶńī¶ņŪ‘ňň„ņīĶųĹŕňŇ∑ĢŌĶÕ≥ĶńĶÁŃųĽ∑£¨ňŔ∂»Ľ∑£¨ļÕőĽ÷√Ľ∑ĶńŅō÷∆£¨*ļů š≥ŲPWM–ŇļŇĺ≠ĻżłŰņŽ«ż∂ĮIPMń£Ņť ĶŌ÷ĶÁĽķĶńňŇ∑ĢĪ’Ľ∑Ņō÷∆°£ŌĶÕ≥Ķń”≤ľĢĹŠĻĻ»ÁÕľ1ňý ĺ°£
◊®“Ķő¨–řőų√Ň◊”6FC5210-0DF33-2AA0
Õľ1”≤ľĢĹŠĻĻÕľ
ŌĶÕ≥ĶńŅō÷∆ő™»żĽ∑Ņō÷∆∑Ĺ Ĺ£¨őĽ÷√Ņō÷∆ «Õ‚Ľ∑£¨“≤ «*÷’ńŅĪÍ£¨ňŔ∂»Ņō÷∆ «÷–Ľ∑£¨ĶÁŃųŅō÷∆ «ńŕĽ∑°£ő™ŃňĪ£÷§∂ĮŐ¨Ōž”¶ňŔ∂»ļÕ∂®őĽ Ī≤Ľ≤ķ…ķ’ūĶī£¨ĶÁŃųĽ∑ļÕňŔ∂»Ľ∑ĺý≤…”√PIDĶųĹŕ£¨őĽ÷√ĶųĹŕ∆ų≤…”√PIĶųĹŕ°£ŌĶÕ≥ĶńŅō÷∆ŅÚÕľ»ÁÕľ2
◊®“Ķő¨–řőų√Ň◊”6FC5356-0BB11-0AE0




