产品展示

优质供应
详细内容
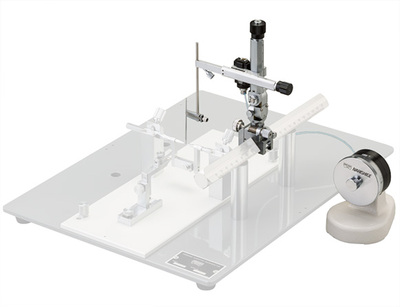
三轴悬吊操纵杆液压式微型机械手。
三维操纵杆操作,同时保持一个简单的姿势。
MMO-202ND微型机械手的特点是一种油液压操纵杆,使一个单一的杠杆能够使三维运动平稳。因为操纵杆是悬挂式的,所以它可以被使用者的手臂和手舒服地放在桌子上。因此,手术是一种自然的姿势,可以维持较长时间。在其他提升易用性的特点中,在控制单元顶部的可动比例调整部分,以及单元的熟悉的圆形设计,而不是传统设备上的更角形状。

*对显微镜的附件,需要一个粗糙的机械手和合适的安装适配器(分开销售)。
*选择TypeB适配器,将该机械手与MMN-1粗机械手组合在一起。
*改变*能接头,包括与显微操作器的双吸管架HD-21(单独销售),支持胚胎活组织检查。
*改变万向接头,将微型机械装置与MMO-220A型单轴油液压微动装置(单独销售)相结合,实现四维遥控运动。
*与返回机制UT-R(单独出售)相结合,MMO-202ND允许机制收回并返回移液管。
| MMO-202ND | MMO-202ND Three-axis Hanging Joystick Oil Hydraulic Micromanipulator(3维油压微操作手) | |
| 附件 | IP铁板,UT-2*能接头,CF-3固定夹,通用扳手 | |
| X10mm,Y10mm,Z10mm | ||
| 运转幅度 | 微调 | 全转旋钮:250μm |
| *小刻度值:2.5μm | ||
| 操纵杆:2mm | ||
| 尺寸/重量 | 控制装置 | W75*D75*H115mm,0.85kg |
| 驱动装置 | W70*D50*H80mm,0.15kg | |
 |  | |
| MN-4 | MN-4 Coarse Manipulator(粗调微操作手) | |
| 附件 | 通用扳手 | |
| 运转幅度 | 粗调 | X30mm,Y30mm,Z30mm |
| 尺寸/重量 | W125*D110*H135mm,0.6kg | |
|
MMO-203 三轴液压显微操纵器 原始的液压模型,具有较大的旋钮,具有良好的线性度。 该微型机械手的液压驱动系统可以远程控制,并提供平稳,无振动的运动。作为vernier类型的继任者,它的特点是一个大的圆筒控制单元,可以很好的操作。另一个关键特征是线性位置的高复制。与目流行的操纵杆方法相比,该控制单元设计简单,成本效益突出,在客户中有着较长的使用记录。对于微注射系统,建议将该模型与操纵杆式机械手结合使用。
| ||

*对显微镜的附件,需要一个粗糙的机械手和合适的安装适配器(分开销售)。
*选择TypeB适配器,将该机械手与MMN-1粗机械手组合在一起。
*将微操作器内的球关节改变为双吸管架HD-21(单独销售),可实现胚胎活检。
*将微型机械手加入到MMO-220A单轴油液压微动器(单独销售)中,可实现四维遥控运动。
MMO-203 Three-axis Oil Hydraulic Micromanipulator(3维油压微操作手)
B-8C球形接头,H-7移液管架,CF-3固定夹
X10mm,Y10mm,Z10mm
微调全转旋钮:250μm
*小刻度值:1μm
控制装置W115*D115*H132mm,1.6kg
驱动装置W70*D50*H80mm,0.15kg
MN-4 Coarse Manipulator(粗调微操作手)
通用扳手
粗调X30mm,Y30mm,Z30mm
W125*D110*H135mm,0.6kg



| MN-151 | MN-151 Joystick Micromanipulator(微操作手) |
| 附件 | B-8B 球形接头 ,P-1A 高度调节板,H-7 移液管架, 通用扳手 |
| 运转幅度 | 粗调:X25mm,Y20mm,Z25mm |
| 微调:Z 轴 8mm:250μm的全转旋钮 | |
| *小刻度值:微调5μm | |
| 操纵杆控制 1:150-1:15 | |
| (X-Y 平面旋转比率) | |
| GJ-1 | |
| 磁力表座尺寸 | W50*D80*H55mm |
| 尺寸/重量 | W50*D80*H230mm,1.5kg |
| IP | Iron Plate(铁盘) |
| 尺寸重量 | W250*D200*H6mm,2.4kg |
    |