


企业档案
- 会员类型:免费会员
- 工商认证: 【未认证】
- 最后认证时间:
- 法人:
- 注册号:
- 企业类型:生产商
- 注册资金:人民币100万
联系我们
联系人:杨先生
技术文章
光学偏振成像技术:原理、应用与沿进展
根据偏振成像系统结构的不同,偏振成像系统可分为分时型、分振幅型、分孔径型和分焦平面型四种。
太原理工大学李智渊团队从偏振光的表示与传播方式入手,先后对偏振成像系统、偏振二维成像技术、偏振三维成像技术和基于超表面偏振器件的偏振探测及成像的研究展开综述,并对以上偏振成像系统分别进行详细介绍和比较分析。对偏振成像技术的发展景进行了展望。
背景与优势
传统光学成像技术主要利用光的强度信息进行目标探测和识别。但仍然存在一些问题。例如,它只能获取光的强度信息,而无法获取光谱、偏振、相位等其他多维物理量,这导致在成像过程中光场信息丢失,并且在恶劣环境下难以正常工作。
而偏振成像技术则不同,它利用了光的偏振特性。光作为一种电磁波,其偏振特性反映了电场矢量在空间传播时的振动方向。偏振成像技术通过分析光波被物体反射后偏振特性的改变,如偏振度、偏振角等,可以获得物体的形状、材料和粗糙度等多维信息。而且,在有散射介质存在的弱光环境中,反射光的偏振信息保持能力远大于强度信息,这使得偏振成像技术在特殊环境下能够更有效地实现目标探测。基于这些独特优势,偏振成像技术在通信、成像和探测等域都得到了广泛应用。
基本理论
1.偏振光的Stokes表示
Stokes矢量法是描述偏振光的常用方法。它通过四个分量S=[S0,S1,S2,S3]T来表示任意偏振光的偏振态。其中,S0表示光场总强度,S1表示0°和90°方向线偏振光的光强差,S2表示±45°方向线偏振光的光强差,S3表示左旋与右旋圆偏振光的光强差。这些分量可通过采集特定角度(通常选取0°、±45°、90°方向)的偏振子图像并对其强度信息处理得到。由于现有探测器无法直接获取光的相位信息,所以采用这种方式。同时,偏振度DoP和偏振角β是描述偏振光特性的重要参数,可根据Stokes矢量计算得到。
2.菲涅耳方程
当非偏振光入射到目标表面时,其传播模型涉及到入射光分解为垂直和平行于入射平面的分量。菲涅耳方程给出了垂直(平行)于入射平面的线偏振光的反射光振幅与入射光振幅之比。基于此方程,我们还可以求得非偏振光入射到目标表面后反射光和折射光的偏振度DoPr和DoPt的计算公式。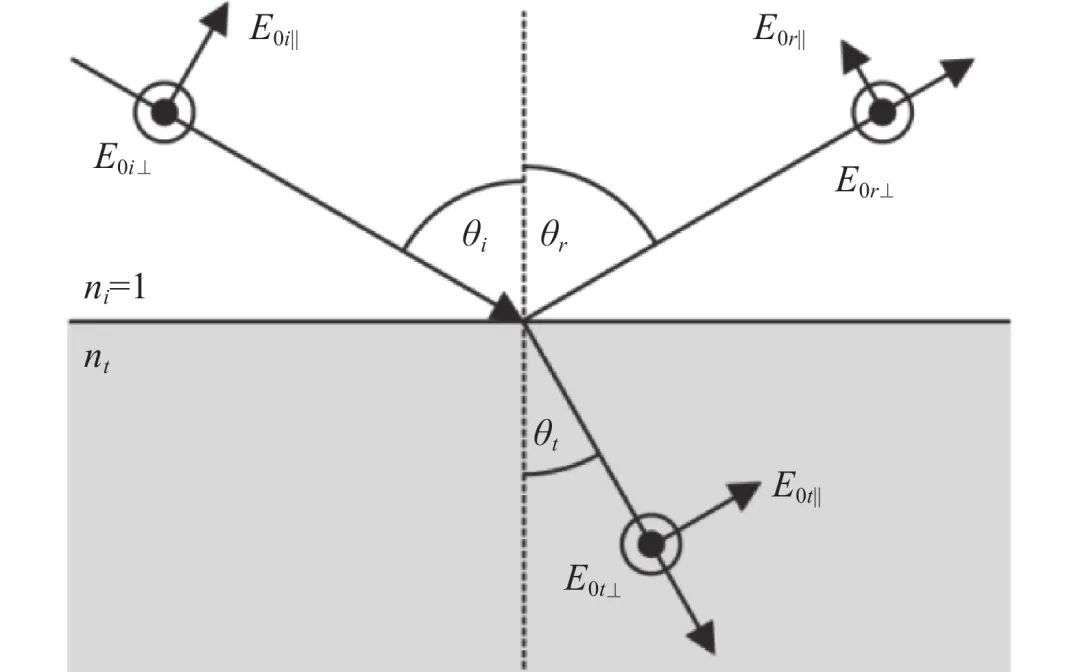 反射光与折射光的垂直分量与平行分量示意图
反射光与折射光的垂直分量与平行分量示意图
偏振成像系统的分类与特点
1.分时型偏振成像系统
分时型偏振成像系统的工作原理是将连续旋转的线偏振片置于探测器,依次获得各线偏振方向的图像,计算得到偏振特征图像。例如,2000年J.Peterson等针对遥感目标设计的分时型偏振成像仪,将探测器积分时间与偏振片旋转时间同步克服了延时问题;2007年L.Bigué设计的高速偏振仪利用铁电液晶光调制器作为半波片,可实现正交双稳态切换,通过处理两帧正交组态图像获得偏振度,图像采集速率可达360Hz;2010年该团队改进系统实现全Stokes偏振探测,帧率为200fps。虽然这种系统结构简单,但由于工作时需要机械旋转偏振片,无法实现动态场景的实时探测,不过它常用于偏振差分成像和三维成像。
2.分振幅型偏振成像系统
分振幅型偏振成像系统利用分光元件将反射光分成多个通道,在每个通道中实施不同的偏振调制方案,利用多个探测器分别在各通道同时获取同一目标场景的多幅图像。1982年R.Azzam等设计了分振幅偏振测量仪,但各光路获取的偏振子图像对应像素所反映的物体信息有偏差,需要对采集到的图像进行配准。2005年A.M.Phenis等将偏振光学元件组合为一个分束器组件减少了估计误差,实现了配准。2017年国防科技大学王玉杰等提出多摄像机标定算法进一步完善配准。该系统具有实时探测的优点,但结构复杂,光路校准困难,并且光能量损耗大,导致弱光环境中获取图像对比度低,信噪比低。
3.分孔径型偏振成像系统
分孔径型偏振成像系统采用离轴或偏心的多组光学系统对同一目标进行探测,在系统孔径处,离轴放置四个成像透镜形成四个通道,每个通道放置偏振元件,通过一次曝光获取各偏振分量的强度图像。2021年刘星洋等通过紧凑的结构设计减小了分孔径阵列的偏心程度,消除了离轴分孔径阵列组带来的额外像差。这种系统结构紧凑、制造成本低,但离轴或偏心结构导致设计和装配较为复杂,加工误差会使各组光学系统性能存在差异,进而引入配准误差,需要对强度图像进行预处理以获得准确偏振信息。
4.分焦平面型偏振成像系统
分焦平面型偏振成像系统把不同偏振方向的微偏振阵列(MPA)集成于探测器焦平面(FPA),探测器每一个感光像元与一个方向的微偏振片对应,实现单次曝光采集同一目标不同偏振方向的图像。1999年J.Nordin等研制了分焦平面型偏振成像仪,但微偏振器消光比很低。2010年R.Perkins等利用干涉光刻工艺制作铝纳米线滤波器阵列并直接沉积在成像传感器顶部,设计制作并测试了100万像素的集成铝纳米线偏振滤波器CCD成像阵列。同年香港科技大学赵晓锦等设计并制作了可见光全Stokes偏振成像的液晶MPA,具有较高的偏振消光比和偏振透过率,但在红外波段偏振特性下降。2018年Sony公司推出的可见光分焦平面偏振探测器通过在每个像元和微偏振器中间集成一个微透镜,提高了偏振探测性能。该系统具有高消光比、低损耗、结构紧凑和实时性高等优点,是当偏振成像的研究热点和未来主流方向,但对MPA和FPA的装配精度要求高,存在偏振图像的非均匀性和偏振图像融合效果差等问题。
偏振二维成像技术的方法与应用
基于偏振差分的偏振二维成像技术
偏振差分成像(PDI)的原理是根据浑浊介质的散射光与目标反射光偏振特性的差异对散射光进行抑制。实际应用中,对偏振方向相互正交的线偏振图像进行差分得到偏振差分图像(即 Stokes矢量中的S1)。
M.P.Rowe等搭建偏振差分成像系统,将金属目标悬浮于稀释的牛奶中模拟水下环境,证明了该方法可呈现常规偏振成像方法不可见的表面特征。2009年T.Treibitz等将主动照明技术引入偏振成像,采用大视场人工照明并加入偏振器件抑制后向散射光,但水下成像距离仅为1-2m。2016年天津大学胡浩丰等综合研究了散射光和直接透射光的偏振对水下成像的影响,通过曲线拟合方法估计目标信号的偏振差分图像,改善了水下成像质量。2022年南京理工大学陈钱课题组提出在一个完整的图像变化周期内采集一系列不同偏振方向的图像,将这些图像累加的结果作为偏振维度的积分,进一步得到各像素的偏振度和清晰的偏振差分图像,能有效抑制图像噪声,提高水下成像质量。
此外,偏振差分技术还可用于图像去雾。2003年Y.Y. Schechner等提出偏振差分成像结合大气物理散射模型对图像重建,利用偏振相机获取正交的两帧图像并差分处理,实现了在雾霾环境中对目标的清晰成像,但未考虑直接透射光对偏振特性的影响。2014年合肥工业大学方帅等综合考虑了散射光和直接透射光在成像过程中的联合偏振效应,建立了新的偏振去雾模型,恢复了更多场景信息。2015年西安电子科技大学刘飞等人采用散射光和直接透射相结合的除雾方法,将偏振差分的思想与小波变换相结合,对距离相机400m的物体进行高清晰度成像。
基于图像融合的偏振二维成像技术
基于伪彩色映射的图像融合:2010年D.A.Lavigne等通过提取红外强度图像、偏振度图像和偏振角图像的公共信息,完成HSV三通道的伪彩色融合,映射到RGB空间获得增强图像。2011年周浦成等采用分解非负矩阵的方法对采集的偏振图像进行处理,得到特征基向量,再映射到HIS空间转变到RGB空间获得增强图像,可实现伪装目标的分离。
基于多尺度变换的图像融合:多尺度变换的方法有小波变换、支持度变换(SVT)和非下采样剪切波变换(NSST)等。例如 2013年中北大学杨风暴等利用SVT将红外偏振图像和强度图像分解并组合,恢复融合图像。2015年中国科学院光电技术研究所刘征等提出基于NSST的可见光偏振图像融合方法,通过NSST分解得到多个子频带,根据高频能量窗和频域低频均值确定融合系数,得到融合图像。2016年梁健等采用多尺度定向非局部均值(MDNLM)滤波器的红外与可见光图像融合方法实现偏振去雾。
基于深度学习的图像融合:2021年中南大学张俊超等提出利用自学习策略解决偏振图像融合问题,网络由编码器、融合和解码器层组成,将编码器提取的特征图像进行融合,再输入解码器生成融合图像。同年张晶晶等提出循环卷积神经网络(CCNN)的方法实现可见光偏振图像去雾,通过目标检测子网络检测烟雾区域,利用编码器-译码器子网络生成无雾区域并与原始雾霾可见光偏振图像融合,得到高清晰度的融合图像。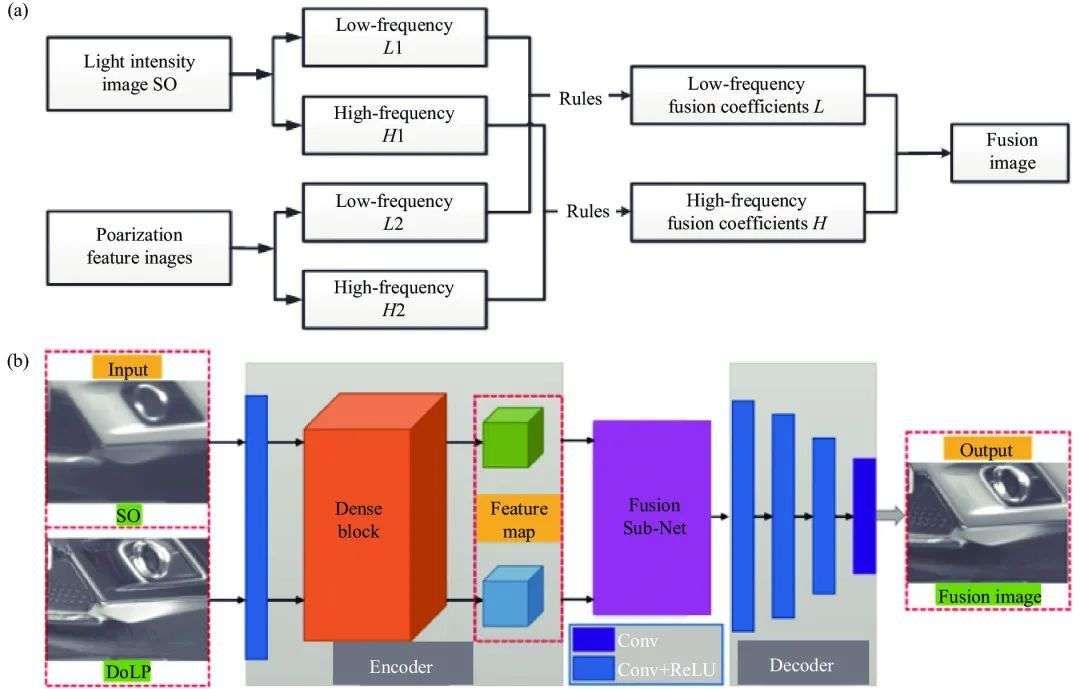 (a) 基于NSST偏振图像融合框架图;(b) 网络架构
(a) 基于NSST偏振图像融合框架图;(b) 网络架构
偏振三维成像技术的原理与方法
1.偏振三维成像原理
光照射到各向异性的物质表面时,会产生镜面反射光和漫反射光,根据反射光成分不同,偏振三维成像可分为基于镜面反射光和漫反射光的偏振三维成像。物体表面法线方向由天顶角θ(入射角)和入射平面的方位角φ共同决定。在成像过程中,基于镜面反射光的偏振三维成像技术存在天顶角不确定的问题,基于漫反射光的偏振三维成像技术虽然不存在天顶角模糊问题,但存在方位角的模糊问题,都需要进行去模糊处理以得到准确的目标表面法线场,进而实现三维重建。由马吕斯定律知,探测器收集到的光强随偏振器件的旋转而变化,目标像素无论是以镜面反射光为主还是以漫反射光为主,其法线方位角的实际值与计算值均存在180°的不确定性,导致三维面形恢复出现严重畸变,所以也需要对方位角进行去模糊处理。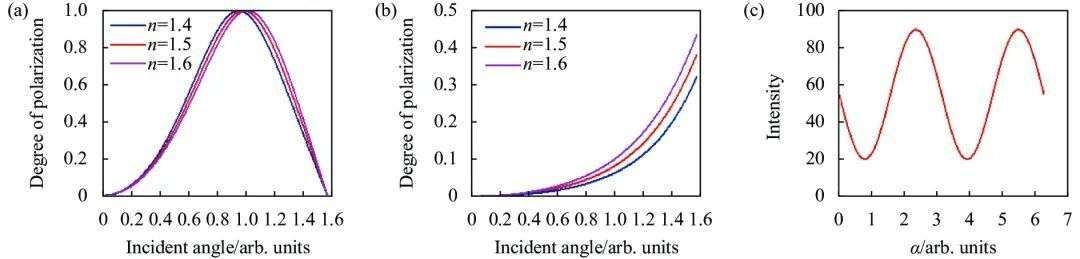 (a)、(b) 镜面反射光和漫反射光偏振度与入射角的关系;(c) 光强随偏振器旋转角度变化曲线
(a)、(b) 镜面反射光和漫反射光偏振度与入射角的关系;(c) 光强随偏振器旋转角度变化曲线
2.基于镜面反射光的偏振三维成像技术
1)天顶角的确定2002年D.Miyazak等人采用旋转目标测量法解决天顶角模糊问题,利用布儒斯特曲线将物体表面划分为三个区域,可对天顶角进行分区域消歧。如果物体是封闭光滑的,解决特定区域内某一个点的模糊问题,即可完成全区域消歧。同年发现当使用红外光照明时,镜面反射光偏振度与天顶角的相关函数是单调的,通过测得光的偏振度可确定天顶角,但红外光的偏振度明显比可见光小,对于较小的入射角,偏振度很难测量,所以将可见光和红外光相结合是处理天顶角模糊问题的有效手段。2012年C.Stolz等提出用多光谱偏振处理方法得到准确的天顶角,根据不同波长光照下偏振度和布儒斯特角间的差异性解决天顶角的模糊问题,但需要测量多个波段的强度值,实验装置复杂。2015年G.Missael等提出利用圆偏振的方法处理天顶角的模糊问题,由天顶角与圆偏振度的关系为单调函数,可确定天顶角。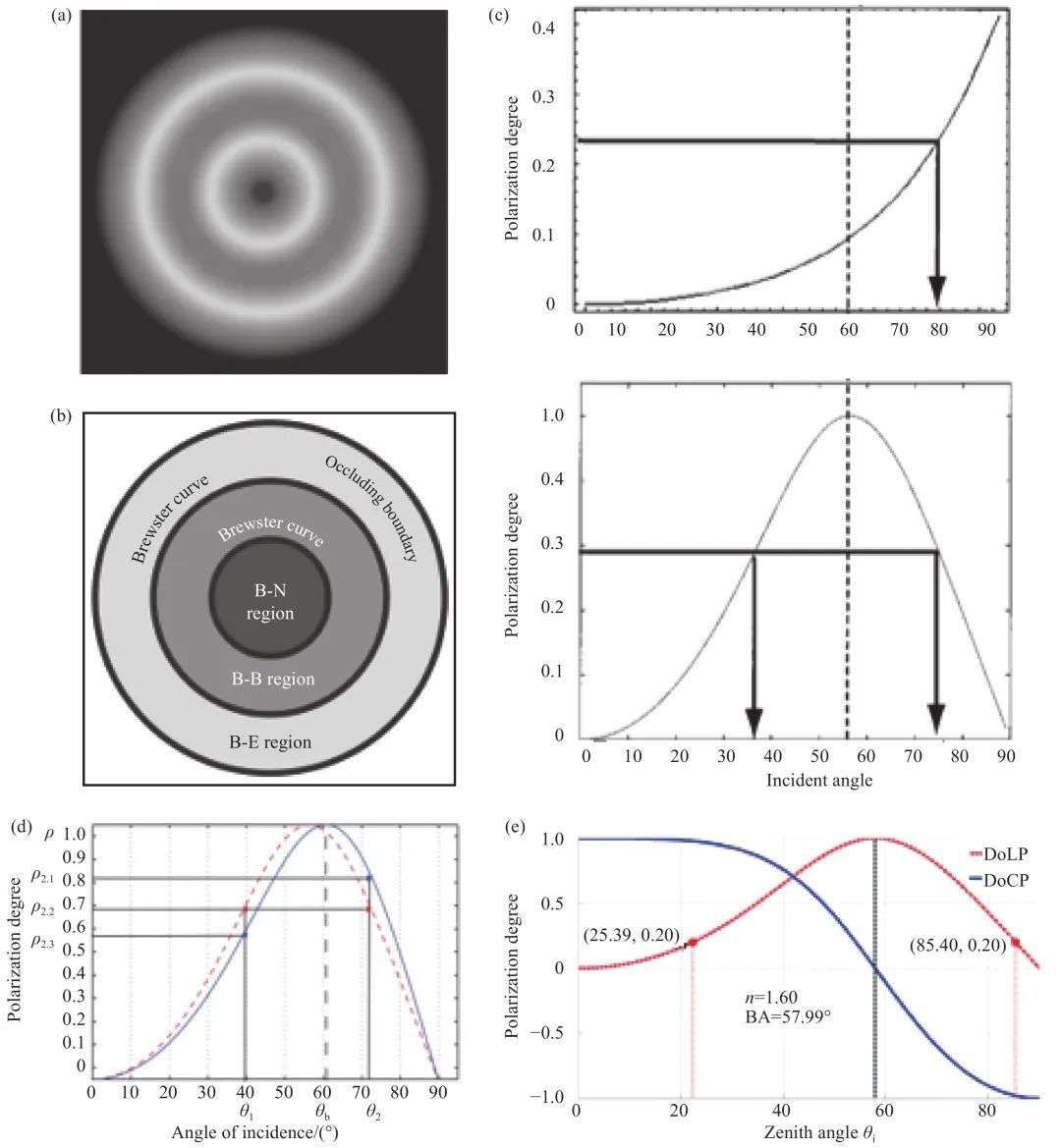 (a)(b) 布儒斯特分割;(c) 红外光和可见光下入射角与偏振度的关系;(d) 两个不同波长下入射角和偏振度关系图;(e) 线偏振度(DoLP)、圆偏振度(DoCP)和天顶角的关系
(a)(b) 布儒斯特分割;(c) 红外光和可见光下入射角与偏振度的关系;(d) 两个不同波长下入射角和偏振度关系图;(e) 线偏振度(DoLP)、圆偏振度(DoCP)和天顶角的关系
2)方位角消歧
2006年O.Morel等提出利用主动照明法消除方位角歧义,采用LED环状光源照明,从四个方向拍摄目标,通过分析各方向的强度图像确定方位角,但成像过程较为复杂,且对光源和,且对光源和环境的要求严格。2017年D.Miyazak等提出利用偏振分析和空间雕刻法恢复目标三维形貌,先通过空间雕刻技术粗略估计物体的三维形貌,然后加入偏振信息实现多视角偏振三维探测,利用奇异值分解(SVD)计算曲面法向量,使小二乘误差小化,可估计光滑物体的形状。
3.基于漫反射光的偏振三维成像技术
1)基于传统光学三维成像方法的偏振三维成像技术
结合光度立体视觉法的偏振三维成像:2007年G.Atkinson等提出利用光度立体视觉技术对方位角进行消歧,通过比较三个照明角度下拍摄图像光强的大小实现对方位角的消歧,但对光源的位置要求严格,成像系统较为复杂,不易实现。
结合飞行时间法(TOF)的偏振三维成像:2017年A. Kadambi等将偏振信息与飞行时间法相结合解决方位角的模糊问题,先由Kinect(TOF相机)得到的粗糙深度获取表面法线信息,然后结合公式校正由偏振信息得到的surface法线场。2019年北京大学杨锦发等利用Astra3D相机获取目标的粗糙深度图,并与偏振信息融合对方位角进行消歧,实现对光滑低纹理目标的三维重建,但该方法仅适用于反射成分为漫反射的物体,且引入了图像配准的问题。
结合多目立体视觉法的偏振三维成像:2017年西北工业大学平茜茜等将偏振信息与双目立体视觉相结合,利用双目立体视觉法标定得到相机参数,将偏振得到的图像像素坐标系下的点云数据转化为坐标系下的绝对数据,实现了高反光无纹理目标真实深度的测量。2019年D.Zhu等提出偏振相机和RGB相机的混合探测系统,通过计算粗糙深度图的梯度计算引导表面法线,再利用引导表面法线消除由偏振信息获取的表面法线的歧义。2021年北京大学张瑞华等采用多视角立体几何与偏振信息融合的三维重建算法消除了方位角歧义,并采用泊松优化方法纠正天顶角偏差,实现对低纹理目标形貌的三三维重建。2022年武汉大学田昕等采用拟合数据项描述偏振面与融合结果之间的线性关系,将目标纹理从偏振曲面转移到融合深度中,采用鲁棒低秩矩阵分解约束双目深度和融合深度,提高了融合深度的精度。
结合结构光投影的偏振三维成像:2017年浙江大学汪凯巍等采用液晶投影仪(LCD),通过在液晶两端施加不同强度的电压可快速获得具有不同偏振方向的出射光,无需旋转线偏振片进行偏振调制,通过对每个结构光图的快照估计场景中的线偏振度(DoLP),通过DoLP来识别目标,并有选择性地进行重建,有利于三维重建和偏振目标增强。
2)基于红外偏振的三维成像
2021年西安电子科技大学韩平丽等提出一种近红外单目偏振三维成像技术,在权重约束中引入参考梯度场,对非均匀反射目标表面法线的模糊进行全局校正,可成功重构出近场和远场反射不均匀的目标形状,并将偏振三维成像的应用扩展到复杂光照条件和较长的探测距离,分辨率为微米。同年西北工业大学李磊磊等建立红外偏振辐射模型,该方法不依赖光照条件和目标表面的纹理特征,具有重建精度较高、实时性好和无数据空洞等优点。
3)基于其他方位角校正算法的偏振三维成像
结合阴影恢复法与偏振信息相结合的偏振三维成像:2012年A.Mahmoud等提出将阴影恢复法与偏振信息相结合对目标实现三维重建,先利用偏振信息得到模糊的方位角,然后根据阴影信息得到的方位角构成的集合,通过比较元素使公式值小来确定方位角的值,但该方法假设目标表面是漫进行漫反射表面,对镜面反射像素并未处理,应用具有一定的局限性。
基于求解大型稀疏线性方程组的偏振三维成像:2019年W.Smith等提出通过求解大型稀疏线性方程组从单帧偏振图像中恢复表面高度,该方法不需要单独进行方位角去模糊处理,在已知光源方向和目标表面均匀反射的情况下,先对表面梯度进行平滑中心差分近似,然后将偏振约束和阴影约束表示为与未知深度相关的大型稀疏线性方程组的形式,利用线性小二乘法对高度进行优化,并将其扩展到一个未校准的室外场景,对不同材料的物体形貌均能实现三维重建。2022年该团队利用独立成分分析的算法将镜面反射和漫反射进行分离,然后利用朗伯体反射模型将漫反射光的强度数据转换为高度数据,再根据高度信息得到表面法线信息,利用公式进行校正,可达到微米的深度分辨率。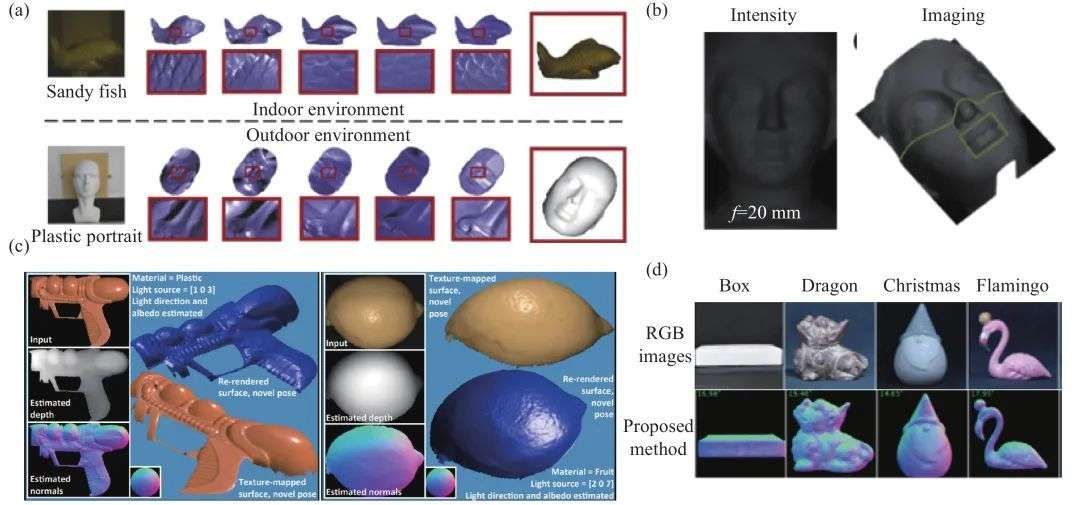 成像结果。(a) 基于偏振成像与双目立体视觉融合的三维重建;(b) 近红外单目偏振三维成像;(c) 基于稀疏线性方程组的线性深度估计;(d) 基于深度学习的偏振三维重建
成像结果。(a) 基于偏振成像与双目立体视觉融合的三维重建;(b) 近红外单目偏振三维成像;(c) 基于稀疏线性方程组的线性深度估计;(d) 基于深度学习的偏振三维重建
4)基于深度学习的偏振三维成像 2020年Y.Ba等提出深度学习结合偏振信息的方法实现目标三维重建,将0°、45°、90°、135°的偏振图像和模糊法线作为输入,通过神经网络学习,终输出准确的表面法线。2022年西安电子科技大学韩平丽等采用基于卷积神经网络的3DMM(3D Morphable Model)模型获取每一像素的模糊表面法线,对由偏振信息得到的表面法线进行约束,从而实现了在自然光照明的环境中实现人脸的三维重建。
基于超表面偏振器件的偏振成像
1.超表面的特性与优势
超表面是一种由亚波长人造天线按照特定顺序均匀或非均匀排列而成的二维光学元件。与传统光学元件不同,超表面的亚波长结构与入射电磁波相互作用,引发界面上光学参量的“突变”,对电磁波的相位产生调控,进而实现对电磁波偏振转换。超表面偏振器件具有体积小、制备简单且易集成的独特优势。
2.基于超表面偏振器件的研究与应用
近年来,随着偏振成像技术域的蓬勃发展,准确地获取偏振信息成为关键。传统偏振元件集成度低,导致偏振成像系统结构复杂、图像配准误差较大,制约了该域发展。基于超表面结构的偏振器件能够将各种偏振元件的功能集成于一体实现偏振探测,弥补了传统偏振成像系统的不足。
2018年,P.C.Wu等设计了基于可见光超表面的片上偏振器件,实验证明集成的超表面芯片可通过单次曝光确定一组Stokes参数,覆盖可见光波段。2019年,A.Basiri等设计了用于近红外偏振检测的双层手性超表面结构,总厚度小于1μm,圆偏振器消光比高达35∶1,传输效率大于80%,将其与线性偏振滤波器集成在同一芯片上,能够实现全Stokes偏振检测。2020年,浙江大学徐杨和南京大学王肖沐等提出并设计了由四个超表面集成石墨烯-硅光电探测器组成的片上偏振仪,该结构可得到任意偏振入射光包括红外光(1550nm)的光强、偏振方向等信息,获得全Stokes参数。2021年,中国科学院张冲等设计并制作了用于近红外全Stokes偏振探测的全介电像素超表面,每个像素由三个方向的线偏振器和一个单层平面结构的圆偏振器组成,设计的圆偏振滤波器在1.6μm波长下的圆二色性可达 70%,在波长为1.48-1.6μm的平均透射效率可达80%以上。2022年,西安工业大学孙雪平等利用矩形TiO2纳米结构设计了正交线性和圆偏振复用超构透镜,者能够独立控制x线偏振光和y线偏振光的聚焦位置,聚焦效率分别为53.81%和51.56%,后者对左旋圆偏振光和右旋圆偏振光聚焦效率分别可达42.45%和42.46%。
此外,还有很多基于超表面偏振器件的研究成果。例如,2018 年美国科学家E.Arbabi等设计了一种基于介质超表面的分焦平面偏振相机,通过在基底上设计非晶硅天线结构,具有三组不同的偏振基,可以分别得到(I0,I90)、(I45,I-45)、(I1,Ir)三组正交偏振态,将三组偏振态正交的光聚焦到同一焦平面的不同位置,根据探测器接收的强度信息,实现全偏振态的测量和偏振成像。2019年,N.A.Rubin等利用矩阵傅里叶光学原理设计并制作了超表面偏振衍射光栅,当光入射到光栅上时,光栅可以将具有不同偏振信息的光进行分选并衍射到不同次,能够在图像传感器上形成四个对应图像,得到的方位角图像可用于三维成像。2022年,该团队具体描述了如何将超表面偏振光栅和传统的光强度成像系统相结合以创建一个能够实现全Stokes偏振测量的系统。2020年,中国科学院宋国峰团队利用金棒和SiO2薄膜组成的单层金属超表面实现了0°、45°和90°偏光器的功能,入射光波长为1.6μm时,平均消光比均为33dB,工作带宽为100nm。此外,添加SiO2间隔层和U型金纳米结构组成双层金属超表面作为圆偏振器,在1.6μm波长下透射模式下的圆偏光二色性达到89%,消光比为830:1。由四个小像素组成的全Stokes超像素可以实现对1.6μm波长任意偏振光的测量,该结构有望与红外焦平面探测器集成,推动红外偏振探测器的发展。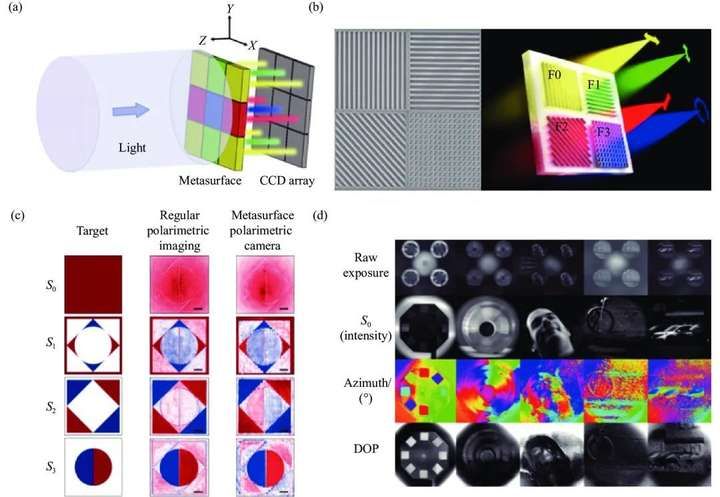 (a) 超表面与CCD阵列的偏振测量装置;(b) 器件结构SEM图像;(c) 偏振成像;(d) 全Stokes偏振成像
(a) 超表面与CCD阵列的偏振测量装置;(b) 器件结构SEM图像;(c) 偏振成像;(d) 全Stokes偏振成像
总结与展望
文章从偏振光的表示与传播方式入手,先后对偏振成像系统、偏振二维成像技术、偏振三维成像技术和基于超表面偏振器件的偏振探测及成像的研究展开综述,并对以上偏振成像系统分别进行详细介绍和比较分析。
针对偏振成像过程中存在的问题,未来需从优化偏振成像系统、改进偏振器件和探测器集成工艺、增强算法普适性和降低复杂度、实现高实时偏振探测等四个方向深入研究。偏振成像技术作为一种具有巨大潜力的光学成像技术,在未来还有很大的发展空间。通过不断的研究和创新,相信它将在更多域发挥重要作用,为我们带来更清晰、更准确的成像效果。
声明:本文仅用作学术目的。文章来源于:李智渊, 翟爱平, 冀莹泽, 李国辉, 王东, 王文艳, 石林林, 冀婷, 刘飞, 崔艳霞. 光学偏振成像技术的研究、应用与进展[J]. 红外与激光工程, 2023, 52(9): 20220808. Zhiyuan Li, Aiping Zhai, Yingze Ji, Guohui Li, Dong Wang, Wenyan Wang, Linlin Shi, Ting Ji, Fei Liu, Yanxia Cui. Research, application and progress of optical polarization imaging technology[J]. Infrared and Laser Engineering, 2023, 52(9): 20220808.

原创作者:罗辑技术(武汉)有限公司
