


企业档案
- 会员类型:免费会员
- 工商认证: 【未认证】
- 最后认证时间:
- 法人:
- 注册号:
- 企业类型:经销商
- 注册资金:人民币万
联系我们
联系人:崔永芳
热门标签
技术文章
DLR/HIT II 灵巧手概述

为了实现手指的模块化设计,5 个手指相同。 每个手指有 3 自由度、4 个关节,末端的两个关节 通过钢丝机构耦合运动。所有的驱动器、电路板、 通信控制等都集成在手指内部。 在 DLR/HIT I 4 指灵巧手的基础上如图1,采用新型 的体积小输出力矩大的电动机、谐波减速器、齿形 皮带等的驱动传动方案,使单手指的体积和质量得 到很大地减小;采用钢丝耦合传动方案,实现手指 末端两个关节的耦合运动。DLR/HIT II 灵巧手采用 了新型的、输出力矩大的盘式直流无刷电动机,电 动机的外形尺寸:直径 20 mm、长 10 mm,质量只 有 15 g,手指指尖输出力能够达到 10 N。电动机的 连线有 8 根,包括 3 根驱动线、3 根霍尔信号线和 2 根霍尔的电源线。

基于当国内外驱动、传动及电子技术 和机电一体化设计方法,DLR/HIT II 灵巧手在机械 结构、电气结构以及系统集成等方面较 DLR/HIT I 手有很大提高,具体体现在以下方面。
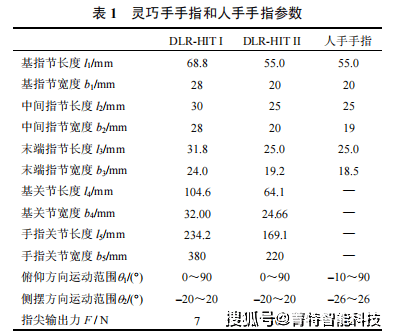
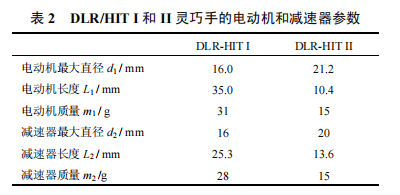
(1) 更小的手指体积、更轻的手指质量。采用 新型的盘式电动机驱动,谐波减速器、齿形皮带传 动,减小了手指体积(长度减小 1/4),降低了手指质 量(质量降低 1/3)。图 3 是 LR/HIT II 型灵巧手、 DLR/HIT I 型灵巧手及人手手指的比较图,其详细 比较尺寸见表 1,表 2 为 I 型和 II 型灵巧手所采用 的电动机、减速器的比较。
(2) 更高的仿人手化程度。手指外形尺寸的减 小,使手指的布置更加灵活,能够放置 5 个手指。 而且能够按照人手的手指位置关系布置各个手指。 根据人手自然状态下的拇指位置和抓握仿真,确定更加仿人手化的拇指位置。
(3) 更加灵活的通信接口。手掌电气系统计算 与控制能力的增强,使灵巧手能够脱离 PCI 总线控 制器,完成一些实时计算。灵巧手与外部的通信接 口,除保留与 PCI 总线控制器连接的点对点串行通 信(Point-to-point serial communication, PPSeCo)外, 还具有 CAN、以太网等其他通信接口。
(4) 更强的操作能力。5 个手指的布置,特别是 小手指的增加和大拇指的空间位置,使灵巧手能够 完成更为复杂、拟人手的抓握操作,这一点对于基 于数据手套的抓握操作尤为明显。
(5) 更合适的手指刚度。替代刚性的齿轮传动, 采用有一定弹性的同步齿形皮带传动,使灵巧手获 得与人手手指相类似的手指刚度,保护了手指,也 有力于抓取。
(6) 外观与本体融为一体。取代 DLR/HIT I 手 的外观和本体分别设计思想,在 II 手中,将外观设 计融入本体设计中,有利于减小手指和手的尺寸、 减少了工作量、缩短了设计时间、降低了成本。
(7) 采用了集成度更高的 FPGA。为了实现更为 复杂的控制算法,使灵巧手具有更为分明的控制层 次,手指的 FPGA 和手掌的 FPGA 采用了密度更高 的 FPGA。
(8) 加速度传感器。为了补偿重力的影响,在 手掌电路板上增加了一个加速度传感器,用于测量 灵巧手的手掌姿态。 DLR/HIT II灵巧手的外形尺寸与成年人的手相 当,质量只有 1.5 kg。而 DLR/HIT I 的外形尺寸大 约是人手的 1.5 倍。在外形尺寸、手指数目、外观 等方面,DLR/HIT II 灵巧手有本质的提高。


原创作者:菁特(上海)智能科技有限公司
