


企业档案
- 会员类型:免费会员
- 工商认证: 【未认证】
- 最后认证时间:
- 法人:
- 注册号:
- 企业类型:经销商
- 注册资金:人民币万
联系我们
联系人:崔永芳
热门标签
技术文章
早稻田大学用uskin传感器开发了深度学习型机器人控制技术
点击次数:29 发布时间:2022/5/23 12:32:28
日立制作所的课题组和早稻田大学理工学部教授 Tetsuya Ogata 的目标是实现工作现场的自动化,由于机器人的工作能力的限制,还没有引入,而且很复杂。他们开发了可以轻松实现动作的深度学习型机器人控制技术。该技术通过学习自动提取机器人手部和物体的特征信息,无需编程即可处理变形物体的搬运(如电缆和盖板的安装、液体和粉末的搬运工作等)。此外,可以关联并执行来自语言指令的未学习运动,包括对象的物理特性(颜色、形状等)和运动内容(抓握、推动等)。未来,我们将构建一个支持人类工作的系统,将机器人尚未引入的各种现场工作自动化,解决少子老龄化导致的劳动力短缺问题。
开发的深度学习机器人控制技术由以下技术组成:
在传统的机器人控制技术中,根据通过物体识别获得的信息,人工编程(轨道规划)物体方向和形状的所有可能动作。因此,在操作因接触而改变形状的不定形物体(如布或绳子)时,很难以编程方式描述所有情况。与此相对,本技术仅通过多次向机器人示教期望动作,就从机器人的视觉和触觉信息中自动提取应关注的信息(对象物的位置、方向等)和此时应采取的动作,在非典型作业中对新情况的操作现在可以在不编程的情况下执行。
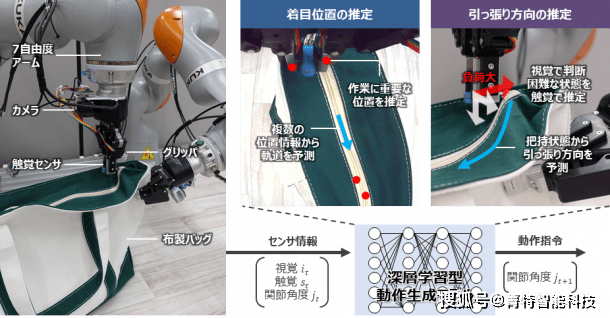 自动提取轨道规划所需的信息的动作
自动提取轨道规划所需的信息的动作
从语言指示中估计指示对象和动作的联想技术
为了实现基于人的语言指令(语音和文本等人类可以理解的信息)的所需行为,所有语言指令和行为之间的关系都是人工编程的。因此,每次添加操作或对象时,都必须将其与语言指令关联。该技术学习机器人的行为、对象和语言指令之间的关系,并将其存储在数据库中。开发了一种技术,通过从包含对象的物理特征(颜色和形状等)和操作内容(抓握或按下等)的语言指令,将存储在数据库中的类似操作的关联结果输入到操作生成模型中,从而从未学习的语言指令自主执行所需的操作。这消除了对语言指令和行为的所有关系进行编程的需要,并增加了可用的行为变体。
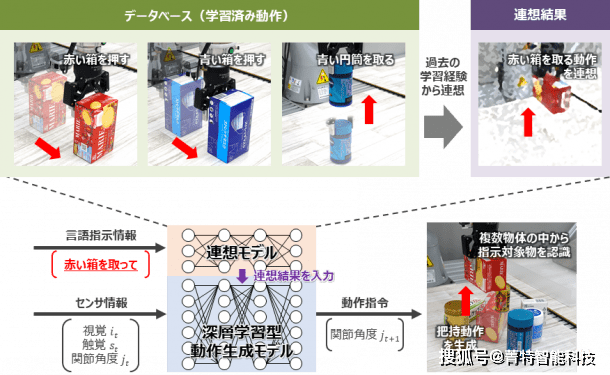 关联对象和动作的关联技术机制
关联对象和动作的关联技术机制
此文章于2021年6月6日至8日举行的日本机械工程师学会2021年机器人和机电一体化讲座(ROBOMECH2021)的海报会议上发表。
声明:除原创内容及特别说明之外,推送稿件文字及图片均来自网络及各大主流媒体。版权归原作者所有。如认为内容侵权,请联系我们删除。
原创作者:菁特(上海)智能科技有限公司
