


企业档案
- 会员类型:免费会员
- 工商认证: 【未认证】
- 最后认证时间:
- 法人:
- 注册号:
- 企业类型:经销商
- 注册资金:人民币万
联系我们
联系人:崔永芳
热门标签
技术文章
3D工作原理 激光三角测量与结构光
点击次数:38 发布时间:2022/5/24 16:58:28
激光三角测量基础
激光三角测量传感器将来自传感器的激光图案投射到物体表面,并使用相机或接收器阵列对表面进行成像。处理器确定摄像头上成像激光的位置,并计算传感器到表面的距离。
激光用于三角测量传感器,因为它们可以有效地产生小的、强烈的和聚焦的光束,从而减少相机的曝光时间,因此可以有效地消除由于物体运动模糊引起的误差。
结构化灯光基础
结构光(条纹投影)使用投射到物体上的一种或多种光图案的反射来创建物体表面的 3D 点云。传感器中的立体摄像头用于实现精度和传感器稳定性。
蓝色 LED 照明用于产生高对比度图案,提供高分辨率扫描和环境光抗扰度。LED 照明对眼睛是安全的,无需遵守激光安全法规。
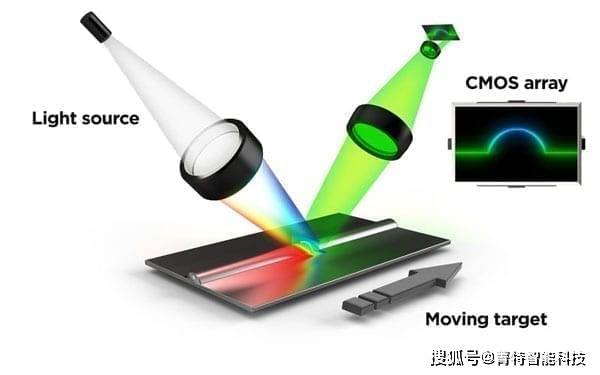
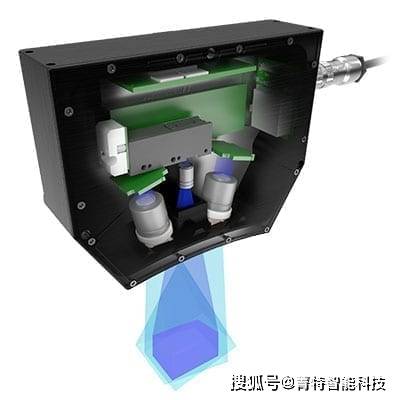
线共焦成像基础
LCI 技术基于一种称为横向色差的光学方法,其中从传感器发射器发出的白光被分成连续的波长光谱。“聚焦”(通过针孔返回)的反射波长映射到高度变化。该技术可用于单点和多点几何形状的同轴设计,以及线几何形状的离轴设计。
线共焦成像技术用于需要亚微米分辨率和高测量速度的苛刻应用中的 3D 形貌、3D 断层扫描和 2D 强度成像。
声明:除原创内容及特别说明之外,推送稿件文字及图片均来自网络及各大主流媒体。版权归原作者所有。如认为内容侵权,请联系我们删除。
原创作者:菁特(上海)智能科技有限公司
