We provide high-density 3-axis tactile sensing, making it possible to
measure a 3-axis movement, providing you with a precise, sensitive,
and overall more reliable tactile data collection.
Our newest uSkin model is: uSkin Curved.
This tactile sensor has 30 individual taxels that can measure 3D
displacement individually. The soft, durable, and curved design allows
for more natural interaction with the object.
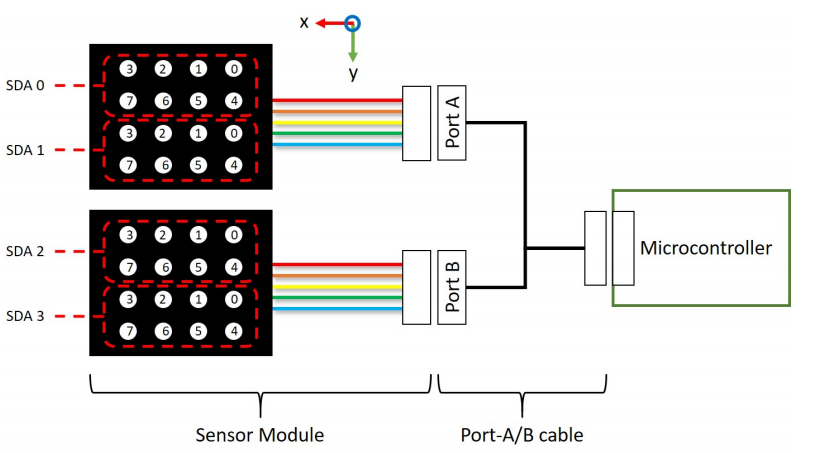
3.1 Sensor Module
Each Sensor Module has 16 sensing points (taxels) in total. Each taxel measures 3-axis skin deformation.
The sampling rate is 100 Hz. Each measurement has 16-bit (8 Most Signifificant Bit/ MSB and 8 Least
Signifificant Bit/ LSB) resolution per axis. Please see Figure.1 for the taxels’ number, their position, and
their respective SDA .
3.2 Port-A/B cable
The Port-A/B cable is used for connecting 2 Sensor Modules to 1 microcontroller. A label at the Port-A/B’s
end identify which Port a Sensor Module is connected to. Depending on this, the SDA number changes.
When a Port-A/B cable is not used to connect a Sensor Module to a microcontroller, it will be treated as
the Sensor Module is connected via Port-A. In other words, the SDA number of the Sensor Module will be
SDA0 and SDA1.
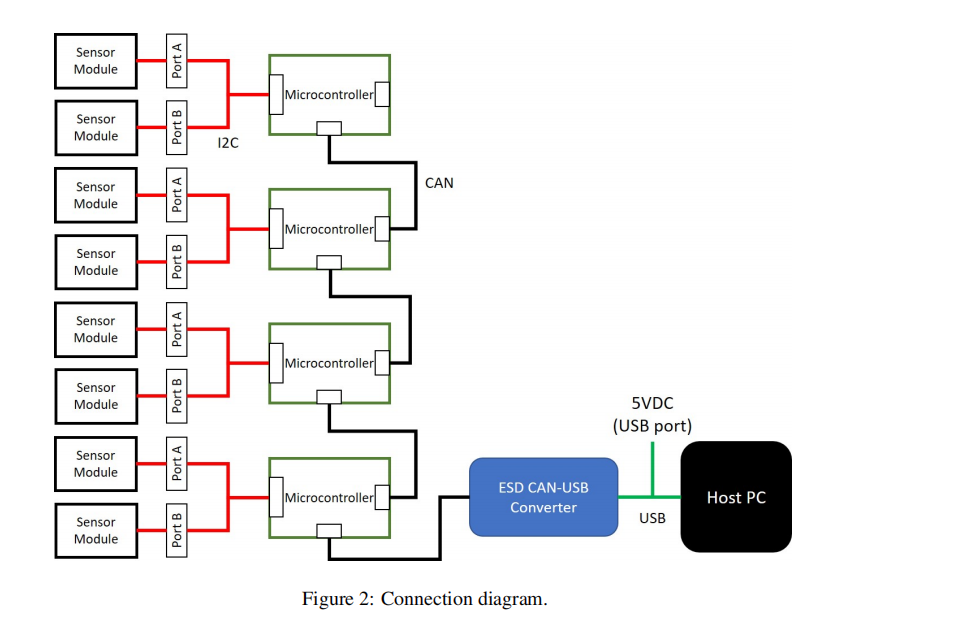
3.3 Microcontroller
The pre-programmed microcontroller is used to start the communication, confifiguring, and collecting the
data of the Sensor Module. The microcontroller can be connected to the Sensor Module through its 8-pin
port. In the current version of the Sensor Module, 2 of the module can be connected to one microcontroller
via the provided Port-A/B cable.
On the microcontroller, there are two 4-pin ports (VDD, D+, D-, GND). One of those ports is for the
communication between the microcontroller and the CAN/USB converter. The other one is for a daisy
chain communication between microcontrollers through a CAN protocol. These ports are interchangeable.
Several microcontrollers with Sensor Modules can be daisy-chained.
3 ©XELA Robotics3.4 ESD CAN/USB Interface
3.4 ESD CAN/USB Interface
This device interfaces a PC with the microcontroller. It is connected to the PC with a serial bus (USB). This
device was developed by ESD and can be purchased separately from https://esd.eu/en/products/can-usb2.
The driver is also available from the given link.
3.5 CAN to DE-9 cable
This cable connects the microcontroller (4-pin connector) to the ESD CAN/USB converter (DE-9 connec
tor). The 4 pin wires are for transmitting data to the ESD CAN/USB interface.
4 Setup & Installation
4.1 Connecting the hardware
1. Plug the 8-pin wires of one Sensor Module’s into a microcontroller. The Port-A/B cable can be used
to connect two Sensor Modules to one microcontroller.
2. Connect the 4-pin connector of the CAN/DE-9 cable to 1 of the 2 4-pin port of the microcontroller.
3. Connect the DE-9 connector of the CAN/DE-9 cable to the CAN/USB Interface.
4. Plug the USB cable of the CAN/USB Interface into any of the USB ports of your PC.
5. Plug the USB power cable of the CAN/DE-9 cable into a PC or USB wall adapter (5V). The power
indicator (blue LED) of the microcontroller should be on.
4.2 Driver and Libraries Installation
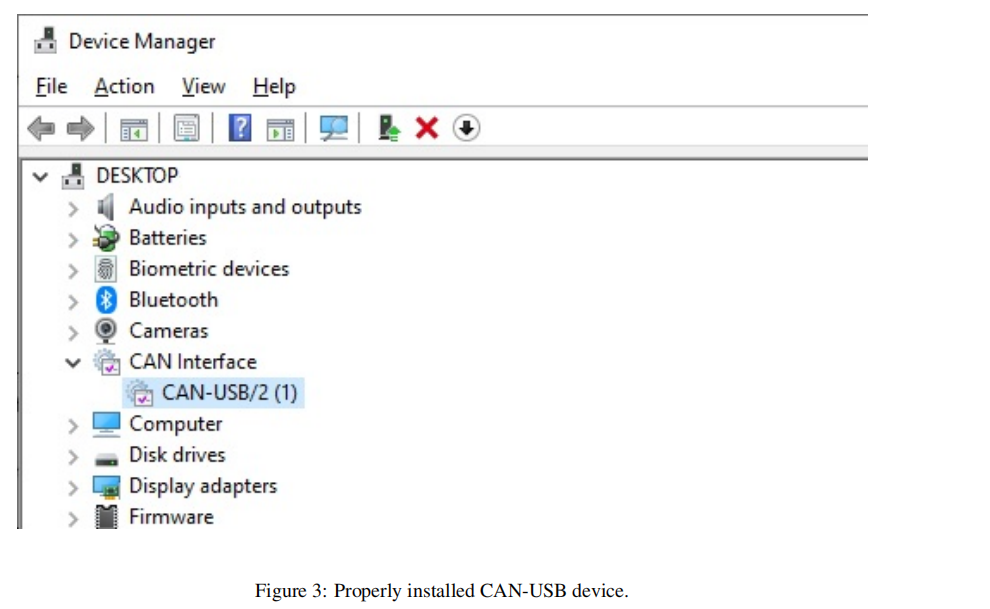
4.2.1 ESD CAN/USB driver
After plugging in the USB cable, open the device manager from the control panel. In the USB section,
make sure that the device is detected as an unknown device. Right click the unknown device and specify
the driver location to the CAN USB Driver folder (...\CAN USB Driver). The driver can be downloaded
4 ©XELA Roboticsfrom the ESD website or can be found inside the installation CD. If it is successful, the unknown device
should turn into "CAN Interface - CAN USB/2" as in Fig. 3.
4.2.2 CAN SDK
Run CAN_SDK.exe from ...\CAN USB driver\CAN_SDK and follow the instructions. This will install the
ESD CAN/USB libraries and sample programs required for the next step.
5 Explanation of CAN ID and CAN message
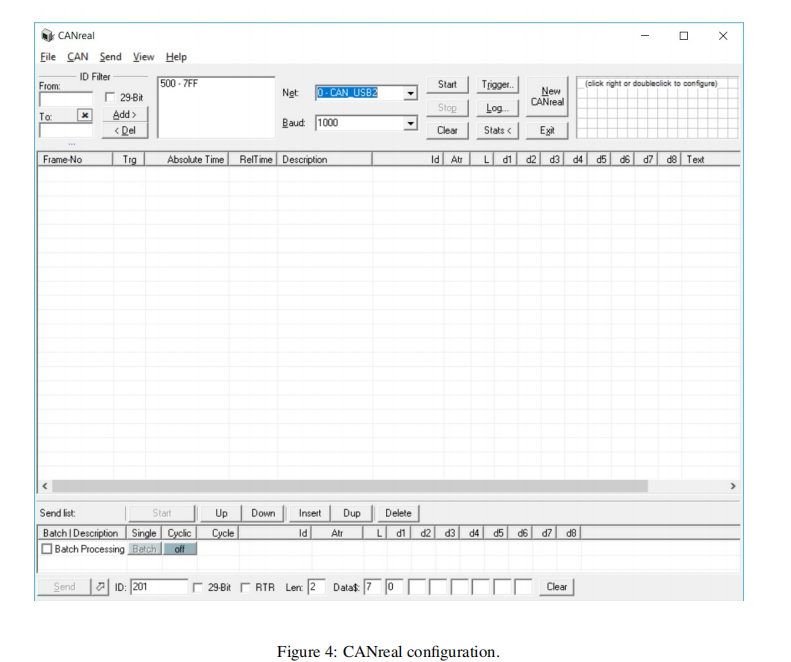
5.1 CANreal
Here we use CANreal application provided by ESD to make the explanation easy to understand. Run the
CANreal application. The application is installed as part of SDK and can be found by default at C:\Program
Files\ESD\CAN\SDK\bin32\CANreal. Confifigure it as in Fig. 4.
5 ©XELA Robotics5.2 Incoming CAN ID structure
Select a detected CAN/USB device by choosing it from the "Net" drop-down menu. If there is nothing that
can be selected, the device may not be plugged or the driver is not installed properly. Confifigure the "Baud"
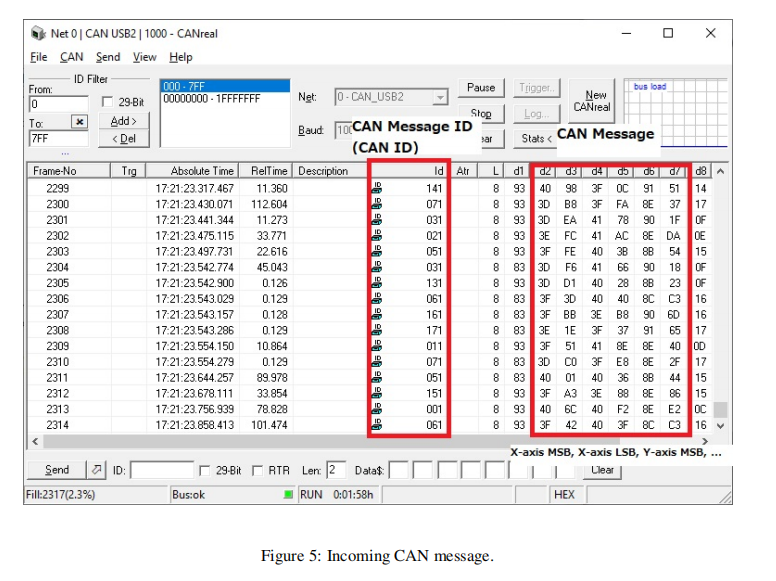
to 1000 then click "Start". A Successful connection will lead to an incoming CAN Message as in Fig. 5. At
this point, your PC is ready to run our sample code.
5.2 Incoming CAN ID structure
Each incoming CAN message comes with its ID. The ID represents the number of microcontroller and the
taxel of the Sensor Module connecting to that microcontroller. The meaning of the ID is as shown in Table

• "Microcontroller ID" is pre-defifined. The number can be found on each microcontroller.
• "SDA number" is defifined from whether Port A or Port B of the Port-A/B cable that the Sensor
Module is connected to. If a Sensor Module is connected to Port A, the SDA number will be 0 and 1
depending on the position of the taxel. See Figure 1 for more detail.
• "Taxel Number" is defifined as in Figure 1.
Therefore, the incoming CAN IDs of the taxels on the Sensor Module which is connected to the microcon
troller ID1 via Port A, are as follow.
• SDA 0 Taxel 0 - 3 : 0x001 - 0x031
• SDA 0 Taxel 4 - 7 : 0x041 - 0x071
• SDA 1 Taxel 0 - 3 : 0x101 - 0x131
• SDA 1 Taxel 4 - 7 : 0x141 - 0x171
For the Sensor Module that is connected via Port B of the same microcontroller ID1, the incoming CAN
IDs of the taxels are as follow.
• SDA 2 Taxel 0 - 3 : 0x201 - 0x231
• SDA 2 Taxel 4 - 7 : 0x241 - 0x271
• SDA 3 Taxel 0 - 3 : 0x301 - 0x331
• SDA 3 Taxel 4 - 7 : 0x341 - 0x371
Note that if a Sensor Module is connected directly to a microcontroller without any Port-A/B cable, it will
be treated as connecting to Port A.
5.3 Incoming CAN Message structure
Each incoming CAN message contain 8-byte data. The data compose of 3-axis components of contact
measurement. The structure of the data is as follows.
• 1st byte : Not used
• 2nd byte : X-axis MSB
• 3rd byte : X-axis LSB
• 4th byte : Y-axis MSB
• 5th byte : Y-axis LSB
• 6th byte : Z-axis MSB
• 7th byte : Z-axis LSB
• 8th byte : Not used
By combining the MSB and LSB part of each axis, the 16-bit measurement can be acquired.






 在线咨询
在线咨询