ФњЕФЮЛжУЃКЪзвГ > ВњЦЗеЙЬќ > ЕчЙЄЕчЦј > ЙЄПиЯЕЭГМАзАБИ > ЦфЫћЙЄПиЯЕЭГМАзАБИ > зЈвЕЮЌао БДМгРГ ЫХЗўЧ§ЖЏЦї 8BVI0055HWD0.000-1


ФПЧАжїСїЕФЫХЗўЧ§ЖЏЦїОљВЩгУЪ§зжаХКХДІРэЦї(DSP)зїЮЊПижЦКЫаФЃЌПЩвдЪЕЯжБШНЯИДдгЕФПижЦЫуЗЈЃЌЪЕЯжЪ§зжЛЏЁЂЭјТчЛЏКЭжЧФмЛЏЁЃЙІТЪЦїМўЦеБщВЩгУвджЧФмЙІТЪФЃПщ(IPM)ЮЊКЫаФЩшМЦЕФЧ§ЖЏЕчТЗЃЌIPMФкВПМЏГЩСЫЧ§ЖЏЕчТЗЃЌЭЌЪБОпгаЙ§ЕчбЙЁЂЙ§ЕчСїЁЂЙ§ШШЁЂЧЗбЙЕШЙЪеЯМьВтБЃЛЄЕчТЗЃЌдкжїЛиТЗжаЛЙМгШыШэЦєЖЏЕчТЗЃЌвдМѕаЁЦєЖЏЙ§ГЬЖдЧ§ЖЏЦїЕФГхЛїЁЃ
ЙІТЪЧ§ЖЏЕЅдЊЪзЯШЭЈЙ§Ш§ЯрШЋЧХећСїЕчТЗЖдЪфШыЕФШ§ЯрЕчЛђепЪаЕчНјааећСїЃЌЕУЕНЯргІЕФжБСїЕчЁЃОЙ§ећСїКУЕФШ§ЯрЕчЛђЪаЕчЃЌдйЭЈЙ§Ш§Яре§ЯвPWMЕчбЙаЭФцБфЦїБфЦЕРДЧ§ЖЏШ§ЯргРДХЪНЭЌВННЛСїЫХЗўЕчЛњЁЃЙІТЪЧ§ЖЏЕЅдЊЕФећИіЙ§ГЬПЩвдМђЕЅЕФЫЕОЭЪЧAC-DC-ACЕФЙ§ГЬЁЃећСїЕЅдЊ(AC-DC)жївЊЕФЭиЦЫЕчТЗЪЧШ§ЯрШЋЧХВЛПиећСїЕчТЗЁЃ
ЫцзХЫХЗўЯЕЭГЕФДѓЙцФЃгІгУЃЌЫХЗўЧ§ЖЏЦїЪЙгУЁЂЫХЗўЧ§ЖЏЦїЕїЪдЁЂЫХЗўЧ§ЖЏЦїЮЌаоЖМЪЧЫХЗўЧ§ЖЏЦїдкЕБНёБШНЯживЊЕФММЪѕПЮЬтЃЌдНРДдНЖрЙЄПиММЪѕЗўЮёЩЬЖдЫХЗўЧ§ЖЏЦїНјааСЫММЪѕЩюВуДЮбаОПЁЃ
ЫХЗўЧ§ЖЏЦїЪЧЯжДњдЫЖЏПижЦЕФживЊзщГЩВПЗжЃЌБЛЙуЗКгІгУгкЙЄвЕЛњЦїШЫМАЪ§ПиМгЙЄжааФЕШздЖЏЛЏЩшБИжаЁЃгШЦфЪЧгІгУгкПижЦНЛСїгРДХЭЌВНЕчЛњЕФЫХЗўЧ§ЖЏЦївбОГЩЮЊЙњФкЭтбаОПШШЕуЁЃЕБЧАНЛСїЫХЗўЧ§ЖЏЦїЩшМЦжаЦеБщВЩгУЛљгкЪИСППижЦЕФЕчСїЁЂЫйЖШЁЂЮЛжУ3БеЛЗПижЦЫуЗЈЁЃИУЫуЗЈжаЫйЖШБеЛЗЩшМЦКЯРэгыЗёЃЌЖдгкећИіЫХЗўПижЦЯЕЭГЃЌЬиБ№ЪЧЫйЖШПижЦадФмЕФЗЂЛгЦ№ЕНЙиМќзїгУЁЃ
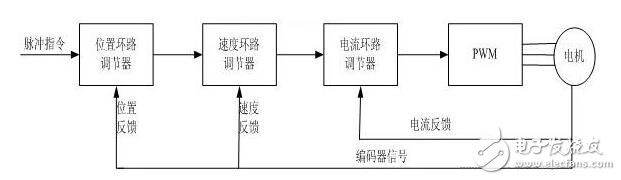
вЛАуЫХЗўЖМгаШ§жжПижЦЗНЪН:ЮЛжУПижЦЗНЪНЁЂзЊОиПижЦЗНЪНЁЂЫйЖШПижЦЗНЪНЁЃ
1ЁЂЮЛжУПижЦ:ЮЛжУПижЦФЃЪНвЛАуЪЧЭЈЙ§ЭтВПЪфШыЕФТіГхЕФЦЕТЪРДШЗЖЈзЊЖЏЫйЖШЕФДѓаЁЃЌЭЈЙ§ТіГхЕФИіЪ§РДШЗЖЈзЊЖЏЕФНЧЖШЃЌвВгааЉЫХЗўПЩвдЭЈЙ§ЭЈбЖЗНЪНжБНгЖдЫйЖШКЭЮЛвЦНјааИГжЕЃЌгЩгкЮЛжУФЃЪНПЩвдЖдЫйЖШКЭЮЛжУЖМгаКмбЯИёЕФПижЦЃЌЫљвдвЛАугІгУгкЖЈЮЛзАжУЁЃ
2 ЁЃЫйЖШФЃЪН:ЭЈЙ§ФЃФтСПЕФЪфШыЛђТіГхЕФЦЕТЪЖМПЩвдНјаазЊЖЏЫйЖШЕФПижЦЃЌдкгаЩЯЮЛПижЦзАжУЕФЭтЛЗPIDПижЦЪБЫйЖШФЃЪНвВПЩвдНјааЖЈЮЛЃЌЕЋБиаыАбЕчЛњЕФЮЛжУаХКХЛђжБНгИКдиЕФЮЛжУаХКХИјЩЯЮЛЗДРЁвдзідЫЫугУЁЃЮЛжУФЃЪНвВжЇГжжБНгИКдиЭтЛЗМьВтЮЛжУаХКХЃЌДЫЪБЕФЕчЛњжсЖЫЕФБрТыЦїжЛМьВтЕчЛњзЊЫйЃЌЮЛжУаХКХОЭгЩжБНгЕФзюжеИКдиЖЫЕФМьВтзАжУРДЬсЙЉСЫЃЌетбљЕФгХЕудкгкПЩвдМѕЩйжаМфДЋЖЏЙ§ГЬжаЕФЮѓВюЃЌдіМгСЫећИіЯЕЭГЕФЖЈЮЛОЋЖШЁЃ
3 зЊОиПижЦ:зЊОиПижЦЗНЪНЪЧЭЈЙ§ЭтВПФЃФтСПЕФЪфШыЛђжБНгЕФЕижЗЕФИГжЕРДЩшЖЈЕчЛњжсЖдЭтЕФЪфГізЊОиЕФДѓаЁЃЌПЩвдЭЈЙ§МДЪБЕФИФБфФЃФтСПЕФЩшЖЈРДИФБфЩшЖЈЕФСІОиДѓаЁЃЌвВПЩЭЈЙ§ЭЈбЖЗНЪНИФБфЖдгІЕФЕижЗЕФЪ§жЕРДЪЕЯжЁЃ
гІгУжївЊдкЖдВФжЪЕФЪжРягабЯИёвЊЧѓЕФВјШЦКЭЗХОэЕФзАжУжаЃЌР§ШчШЦЯпзАжУЛђРЙтЯЫЩшБИЃЌзЊОиЕФЩшЖЈвЊИљОнВјШЦЕФАыОЖЕФБфЛЏЫцЪБИќИФвдШЗБЃВФжЪЕФЪмСІВЛЛсЫцзХВјШЦАыОЖЕФБфЛЏЖјИФБфЁЃ
ШчЙћЖдЕчЛњЕФЫйЖШЁЂЮЛжУЖМУЛгавЊЧѓЃЌжЛвЊЪфГівЛИіКузЊОиЃЌЕБШЛЪЧгУзЊОиФЃЪНЁЃ
ШчЙћЖдЮЛжУКЭЫйЖШгавЛЖЈЕФОЋЖШвЊЧѓЃЌЖјЖдЪЕЪБзЊОиВЛЪЧКмЙиаФЃЌгУзЊОиФЃЪНВЛЬЋЗНБуЃЌгУЫйЖШЛђЮЛжУФЃЪНБШНЯКУЁЃ
ШчЙћЩЯЮЛПижЦЦїгаБШНЯКУЕФБеЛЗПижЦЙІФмЃЌгУЫйЖШПижЦаЇЙћЛсКУвЛЕуЃЌШчЙћБОЩэвЊЧѓВЛЪЧКмИпЃЌЛђепЛљБОУЛгаЪЕЪБадЕФвЊЧѓЃЌВЩгУЮЛжУПижЦЗНЪНЁЃ
ЩюлквЛХЕЛњЦїШЫгаЯоЙЋЫО ЪЧвЛМвзЈвЕДгЪТздЖЏЛЏВњЦЗЯњЪлМАЮЌаогквЛЬхЕФЗўЮёаЭЙЋЫОЃЌЪЧЪЕЬхЕъгыЭјЕъЕФНсКЯЃЌЕБНёЛЅСЊЭјИпЫйЗЂеЙЕФЯждкЃЌЮЊПЭЛЇЬсЙЉзюПьЕФХфМўЙЉгІЃЌзюЪЕЛнжБЙлЕФМлИёЃЌзюБуНнЕФММЪѕзЩбЏЁЃ
НјПкЩшБИВ№ЛњХфМў,ЫХЗўЦїЁЂБфЦЕЦїЁЂжБСїЕїЫйЦїЁЂPLCЁЂДЅУўЦСЁЂЫХЗўЗЇЁЂDCSЁЂЪгОѕЁЂМЄЙтПижЦЦїЁЂБрТыЦїЁЂФЃПщЁЂАхПЈЁЂАыЕМЬхЩшБИХфМўЁЂЙЄвЕЛњЦїШЫХфМўЕШ
ЬиБ№ЪЧЦЋУХЁЂРфУХЕФВњЦЗЃЌПЩвдЖревЮвЃЌМАЪБЙЉЛѕЃЌМлИёгХЛнЁЃ
ЦЗХЦЃКABЃЌПтПЈЃЌСІЪПРжЃЌABBЃЌШ§СтЃЌЮїУХзгЃЌгЂИёТъЬиЃЌGEЃЌЪЉФЭЕТЃЌБДМгРГЃЌАЌФЌЩњЃЌТзДФЃЌАйИёРЃЌЛєФсЮЄЖћЃЌЗЂФЧПЦЃЌДЈЦщЃЌБЖИЃЃЌШ§бѓЃЌЪЉПЫЃЌПЦЖћФІИљЃЌИЛЪП
ДѓСПШЋаТЖўЪжЯжЛѕПтДцЃЁЃЁ
ЛЖгжТЕчзЩбЏ
ЭѕаТИљ 15302650631 ЮЂаХЭЌКХ
жЃжиЩљУїЃКБОЙЋЫОЫљгаВњЦЗБъМлВЛЪЧЪЕМлЃЌОпЬхМлИёЕчвщЮЊзМЃЁ
ЙуЖЋЪЁЩюлкЪаБІАВЧјИЃгРеђКЭЪЂЙЄвЕЧј5ЖА3ТЅ
518103
3100544643@qq.com
ЛЊФЯЮЌаоSIEMENSЮїУХзгБфЦЕЦї6SE7015-0EP50-Z
УХзгБфЦЕЦїЪЧгЩЕТЙњЮїУХзгЙЋЫОбаЗЂЁЂЩњВњЁЂЯњЪлЕФжЊУћБфЦЕЦїЦЗХЦЃЌжївЊгУгкПижЦКЭЕїНкШ§ЯрНЛСївьВНЕчЛњЕФЫйЖШЁЃВЂвдЦфЮШЖЈЕФадФмЁЂЗсИЛЕФзщКЯЙІФмЁЂИпадФмЕФЪИСППижЦММЪѕЁЂЕЭЫйИпзЊОиЪфГіЁЂСМКУЕФЖЏЬЌЬиадЁЂГЌЧПЕФЙ§
ДІРэЕЅдЊ---НгЪмБШНЯМјБ№ЕЅдЊРДЕФаХКХЃЌАДБШНЯМјБ№ЕЅдЊЕФвЊЧѓНјааДІРэЃЌИљОнБШНЯЛЗНкЪфГіСПЕФДѓаЁЁЂаджЪЁЂзщКЯЗНЪНГіЯжЕФЯШКѓЫГађЃЌРДШЗЖЈБЃЛЄзАжУЪЧЗёгІИУЖЏзїЃЛгЩЪБМфМЬЕчЦїЁЂжаМфМЬЕчЦїЕШЙЙГЩЁЃЕчСїБЃЛЄЃКЫйЖЯ
бЮЬяЮЌаоSIEMENSЮїУХзгМЬЕчБЃЛЄзАжУ
ЕБЕчСІЯЕЭГжаЕФЕчСІдЊМўЃЈШчЗЂЕчЛњЁЂЯпТЗЕШЃЉЛђЕчСІЯЕЭГБОЩэЗЂЩњСЫЙЪеЯЮЃМАЕчСІЯЕЭГАВШЋдЫааЪБЃЌФмЙЛЯђдЫаажЕАрШЫдБМАЪБЗЂГіОЏИцаХКХЃЌЛђепжБНгЯђЫљПижЦЕФЖЯТЗЦїЗЂГіЬјеЂУќСювджежЙетаЉЪТМўЗЂеЙЕФвЛжжздЖЏЛЏДыЪЉКЭЩш
Ђй ЗВБОЭјзЂУї"РДдДЃКвзЭЦЙу"ЕФЫљгазїЦЗЃЌАцШЈОљЪєгквзЭЦЙуЃЌЮДОБОЭјЪкШЈВЛЕУзЊдиЁЂеЊБрЛђРћгУЦфЫќЗНЪНЪЙгУЁЃвбЛёБОЭјЪкШЈЕФзїЦЗЃЌгІдкЪкШЈЗЖЮЇФк
ЪЙгУЃЌВЂзЂУї"РДдДЃКвзЭЦЙу"ЁЃЮЅепБОЭјНЋзЗОПЯрЙиЗЈТЩд№ШЮЁЃЂк БОЭјЗВзЂУї"РДдДЃКxxxЃЈЗЧБОЭјЃЉ"ЕФзїЦЗЃЌОљзЊдиздЦфЫќУНЬхЃЌзЊдиФПЕФдкгкДЋЕнИќЖраХЯЂЃЌВЂВЛДњБэБОЭјдоЭЌЦфЙлЕуКЭЖдЦфецЪЕадИКд№ЃЌЧвВЛГаЕЃДЫ РрзїЦЗЧжШЈааЮЊЕФжБНгд№ШЮМАСЌДјд№ШЮЁЃШчЦфЫћУНЬхЁЂЭјеОЛђИіШЫДгБОЭјЯТдиЪЙгУ ЃЌБиаыБЃСєБОЭјзЂУїЕФ"ИхМўРДдД"ЃЌВЂздИКАцШЈЕШЗЈТЩд№ШЮЁЃ
Ђл ШчЩцМАзїЦЗФкШнЁЂАцШЈЕШЮЪЬтЃЌЧыдкзїЦЗЗЂБэжЎШеЦ№СНжмФкгыБОЭјСЊЯЕЃЌЗёдђЪгЮЊЗХЦњЯрЙиШЈРћЁЃ
ЂмвзЭЦЙувГУцЯдЪОВњЦЗаХЯЂОљгЩЦѓвЕзджїЗЂВМЃЌаХЯЂФкШнецЪЕадЁЂзМШЗадгыКЯЗЈадгЩЯрЙиЦѓвЕИКд№ЃЌвзЭЦЙуЖдДЫВЛГаЕЃШЮКЮд№ШЮЃЌШчгіЗЧЗЈЛђЧжШЈаХЯЂЛЖгМрЖНЃЌЧыСЊЯЕQQЃК1273397930ЛђепЗЂгЪМўжСЃК1273397930@qq.comЃЌШчгаШЗЪЕжЄМўжЄУїЪєЪЕЃЌБОеОНЋЖдЦфЩОГ§ДІРэЃЌаЛаЛЃЁ
Ђн БОаХЯЂгЩзЂВсЛсдБЃКЩюлквЛХЕЛњЦїШЫгаЯоЙЋЫОЗЂВМВЂЧвИКд№АцШЈЕШЗЈТЩд№ШЮЁЃ

взЭЦЙуПЭЗўЮЂаХ




